 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Navigation
Сущность определения места судна методом обсерваций
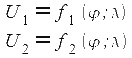
Одному навигационному параметру соответствует одно уравнение изолинии типа
![]()
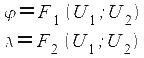
Место судна указывается двумя величинами φ и λ, они являются неизвестными. Следовательно, для обсервации необходимо одновременно измерить два НП: U1 и U2. Получим систему из двух уравнений с двумя неизвестными φ и λ:
Решив эту систему, получим координаты судна:
Такой метод называется – прямое аналитическое решение. Его можно реализовать с помощью ЭВМ.
При визуальных обсервациях (или с помощью РЛС) изолинии представляют собой прямые или окружности, поэтому можно применить геометрический метод, который сводится к проведению на карте двух изолиний, соответствующих одновременно измеренным НП.
Для повышения точности места судна обсервацию производят по трем и более НП.
Место судна, полученное независимо от счисления по НП, измеренным относительно ориентиров, называется обсервованным.
Совокупность действий, выполняемых при получении обсервованного места называется обсервацией.
Координаты обсервованного места называются обсервованными φ0 и λ0.
Счислимое место из-за погрешностей в элементах счисления в общем случае не совпадает с обсервованным. Это несовпадение называется невязкой. Она определяется направлением, вектором от счислимого места к обсервованному и расстоянием между ними. Направление измеряется с точностью до 10, расстояние – до 0,1 мили.
Последовательность действий при определении обсервованного места судна графическим методом:
- По навигационной карте относительно счислимого места выбираются ориентиры. Предпочтение отдается близлежащим ориентирам, угол между направлениями на которые близок к прямому (в любом случае не меньше 30°), при обсервации по 2-м ориентирам КК 60° (120° по 3-м ориентирам);
- Производится опознание выбранных ориентиров по их характеристикам;
- Производится точное измерение навигационных параметров с фиксацией момента и отсчета лага;
- Отсчеты навигационных параметров исправляют поправками и получают обсервованные НП;
- Рассчитывается счислимое место, соответствующее моменту измерения последнего НП;
- Производится приведение измерений к одному моменту;
- На карте проводятся навигационные изолинии, соответствующие приведенным НП;
- В точке пересечения навигационных изолиний получают обсервованное место судна, которое обозначается соответствующим условным знаком, моментом и ОЛ.
- Определяется направление и величина невязки;
- Рассчитывается СКП обсервации;
- Производится запись обсервации на правую страницу судового журнала: момент, отсчет лага, название ориентира, отсчет НП, все поправки. Аналогично записываются и другие НП. После последнего НП записываются обсервованные координаты, направление и величина невязки, точность обсервованного места.
Влияние на точность обсервации неодновременности измерения навигационных параметров.
Неодновременность измерения НП при движении судна приводит к погрешности в обсервованном месте.
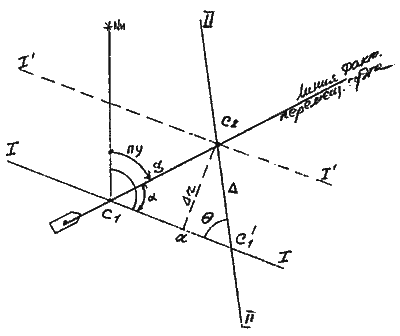
Пусть в момент Т1, когда судно находится в точке С1, измерен первый НП. Ему соответствует изолиния I-I. После того как судно прошло расстояние S=V(T2-T1), в момент Т2 измерен второй НП и получена изолиния II-II. Если не учесть перемещение судна за интервал между измерениями НП, то обсервованное место судна будет получено не в точке С2, в которой фактически находилось судно, а в точке С1'. Отрезок Δ=С2С1' – линейная погрешность обсервованного места вследствие неодновременности измерения НП.
Из точки С2 опустим перпендикуляр С2а на линию I-I. Из треугольника аС2С1' получим:
![]()
где Θ – угол пересечения изолиний. Из треугольника С2С1 следует,что:
![]()
Поэтому:
![]()
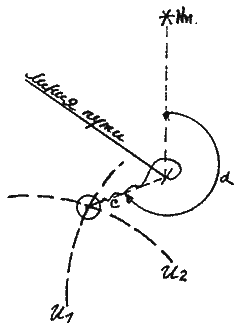
где α – угол между линией пути и направлением первой изолинии; V – путевая (абсолютная) скорость судна; t – время между моментами измерений НП.
Анализируя это выражение, приходим к выводам:
- Δ=0, если α=0, то есть если первая изолиния совпадает с линией пути. Отсюда правило: первым измеряется НП изолиния которого составляет острый угол с линией пути.
- Величина Δ растет с увеличением скорости судна и с увеличением времени между моментами измерений НП.
- При прочих равных условиях угол пересечения изолиний, близкий к прямому, является наиболее выгодным (при обсервации по двум НП).
Способы уменьшения влияния неодновременности измерения НП на точность обсервации.
1-й способ применяется когда все НП измерены в течении 1,0 – 1,5 мин.
Порядок действий:
- в быстрой последовательности измеряются НП U1 и U2 первого и второго ориентиров;
- замечается момент и ОЛ;
- измеряется НП U1' первого ориентира;
- навигационные параметры первого ориентира приводятся к моменту измерения НП второго ориентира путем осреднения: U1=0,5(U1+U1').
Если место определяется по трем ориентирам, то первый и второй НП приводятся к моменту измерения третьего путем повторных измерений НП относительно второго и первого ориентиров и расчета их средних значений.
2-й способ применяется при более длительных интервалах между измерениями НП. Для получения обсервованного места судна первую изолинию необходимо сместить параллельно самой себе вдоль линии пути на расстояние S1=V(T2-T1).
Если место определяется по трем ориентирам, то первая изолиния смещается на расстояние S1=V(T3-T1), а вторая на S2=V(T3-T2). Полученное при этом обсервованное место будет на момент и ОЛ третьего измерения.
В этом способе безразлично от какой точки приводимой изолинии откладывается вектор S: его можно отложить от точки пересечения изолинии с линией пути или от смещенных ориентиров (или любой другой).
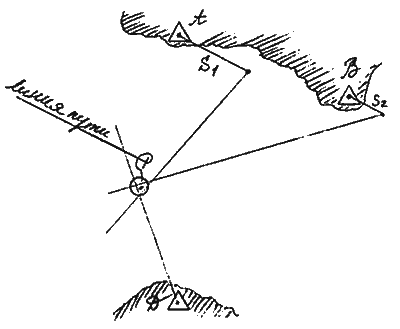
Первый ориентир смещается по направлению линии пути на S1=V(Tn-T1), второй S2=V(Tn-T1), iтый на Si=V(Tn-T1). Ориентир, НП относительно которого измерялся последним, не смещается