 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Navigation
Определение места судна по двум горизонтальным углам
При определении места судна по двум горизонтальным углам необходимо иметь в видимости наблюдателя три ориентира, нанесенных на карту.
|
|
|
|
Рис. 68. Определение места по |
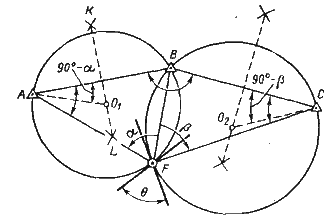
Рис. 69. Определение места |
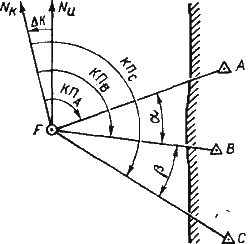
Измерение горизонтальных углов между ориентирами выполняется с помощью секстана или они рассчитываются как разность между компасными пеленгами на соответствующие ориентиры А, В и С (рис. 68)
α=КПB - КПA;
β = КПС - КПB,
Место судна определяется пересечением двух окружностей, вписывающих измеренные углы α и β и проходящих соответственно через ориентиры А, В и В, С.
Получение места на карте может быть выполнено несколькими способами.
Графический способ. Заключается в построении окружностей, вмещающих измеренные углы между ориентирами.
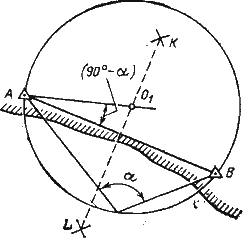
Для построения окружности, вмещающей угол α, проводят перпендикуляр к середине линии АВ (рис. 69). Далее, из точки А под углом (90° — α) к отрезку А В проводят прямую до пересечения с перпендикуляром в точке 01. Радиусом, равным 01А или 01В, проводят первую окружность. Таким же образом строят вторую окружность, вписывающую угол β измеренный между ориентирами В и С. Если разность, например (90° — α), будет отрицательна, то и угол из точки А откладывается в противоположную сторону, т.е. от судна (рис. 70).
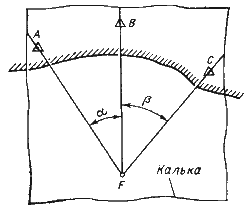
Способ с использованием кальки. По середине листа кальки проводят прямую линию, которую принимают за общую сторону измеренных углов. Из произвольной точки этой прямой F (рис. 71), как из общей вершины, строят правый и левый углы. Кальку накладывают на карту и, перемещая ее, добиваются совмещения сторон нанесенных углов с соответствующими ориентирами на карте. Накол циркулем в общей точке F даст место судна на карте.
Способ с использованием протрактора. Протрактор представляет особой инструмент, позволяющий построить два смежных горизонтальных угла с общей вершиной в его центре. Он имеет неподвижную среднюю и две подвижных крайних линейки. Углы между средней и крайними линейками устанавливаются с высокой точностью по азимутальному кругу.
|
|
|
|
Рис. 70. Построение окружности, |
Рис.
71. Нанесение места судна |
Установив измеренные углы на протракторе, перемещают его на карте до тех пор, пока рабочие гранки линеек не будут проходить через обозначения соответствующих ориентиров. Накол иглой протрактора, помещенной в общей вершние углов, даст место судна на карте.
Случай неопределенности. При определении места судна по двум горизонтальным углам может встретиться случай, когда все три ориентира А, В, С и судно будут находиться на одной окружности (рис. 72). В этом частном случае, измеряя углы α и β, получают одну и ту же окружность, которая одновременно вписывает оба угла. Из любой точки данной окружности левый угол между ориентирами А и В будет равен α, а правый — между ориентирами В и С — углу β.
|
|
|
Рис. 72. Случай неопределенности |
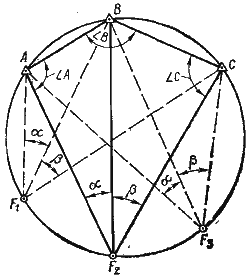
Таким образом, в результате измерения двух горизонтальных углов получим всего лишь одну изолинию. Следовательно, по этим наблюдениям определить место судна невозможно. Из рис. 72 видно, что в этом случае угол В + (α + β) = 180°.
Угол при среднем предмете В снимается с карты, а два других α и β судоводитель измеряет секстаном. Если сумма углов близка к 180°, то определять место судна в данный момент не рекомендуется.
Избежать случая неопределенности можно выбором ориентиров, имеющих следующее взаимное расположение.
1. Все три ориентира расположены на одной прямой.
2. Средний ориентир расположен ближе к судну, чем два крайних.
3. Три
ориентира расположены в вершинах треугольника, внутри
которого находится судно.
4. Все три ориентира находятся на одинаковом расстоянии от судна.
Практическое выполнение способа.
1. Подобрать на местности хорошо видимые, нанесенные на карту три ориентира, предварительно убедившись в отсутствии случая неопределенности.
2. Подготовить к наблюдениям секстан и определить поправку индекса (i).
3. Измерить углы, соблюдая следующую очередность:
в благоприятных условиях наблюдения первым измерить угол, который изменяется медленнее (углы, близкие к траверзу);
в условиях сильной качки, ночью и днем при плохой видимости первым измерять угол, наиболее трудный для наблюдения.
4. Привести углы к одному моменту, если скорость судна более 12 уз и прокладка ведется на крупномасштабных картах. Для этого после измерения второго угла заметить время и отсчет лага и вновь повторить измерение первого угла. В этом случае отсчет секстана (ос) первого угла рассчитывается
осср = (ос1 + ос2)/2.
5. Выбрать из формуляра секстана по значениям измеренных углов инструментальные поправки s и исправить отсчеты секстанов суммар ной поправкой (i + s).
6. Полученные значения горизонтальных углов установить на протракторе или построить их на кальке. Совмещением сторон построенных углов с соответствующими ориентирами на карте получить место судна.
Точность способа. Способ относится к числу наиболее точных, так как средняя квадратичная ошибка измерения горизонтальных углов секстаном составляет 1 — 2,2'.
gα = dAB/DADB, (93)
где dAB — расстояние между ориентирами;
DA, DB — расстояния от судна до ориентиров, между которыми измеряется угол.
Используя формулы (89) и (92), можно написать

где mα, mβ — ошибки измерения горизонтальных углов, рад; gα, gβ — градиенты горизонтальных углов α и β рад/мин.
Приняв, что mα = mβ и подставив значения градиентов, получим формулу точности способа
 (94)
(94)
где mα — ошибка измерения горизонтальных углов; DА, DС — расстояния от судна до крайних ориентиров; DB — расстояние от судна до среднего ориентира; d AB — расстояние между ориентирами A и В; dBC — расстояние между ориентирами В и С;
θ — угол пересечения линий положения.
Из рис. 69 можно вывести, что угол θ, заключенный между касательными, проведенными к окружностям в точке нахождения судна, будет определяться выражением
θ = 360° — (угол В + α +β).
На основании, анализа формулы (94) можно сделать вывод, что для получения места судна с достаточной точностью необходимо иметь 30° < θ < 150°.
Достоинства способа: высокая точность определения места; независимость определения места от поправки компаса.
Недостатки: необходимость наличия в видимости судоводителя трех ориентиров; сложность измерения горизонтальных углов в условиях сильной качки и различной видимости ориентиров ночью; отсутствие третьей контрольной линии положения, что затрудняет обнаружение промахов в опознании ориентиров или в снятии углов; наличие случая неопределенности; сравнительная громоздкость исполнения способа.
Способ целесообразно применять при необходимости иметь точное место в условиях, не благоприятных для пеленгования, например в штормовую погоду, а также в случае отсутствия уверенности в знании поправки компаса. В последнем случае, измерив компасные пеленги на три ориентира, рассчитывают из них два горизонтальных угла и по ним определяют место судна. Далее, снимают с карты истинные пеленги на эти же ориентиры из обсервованной точки. По формуле (28) рассчитывают три значения поправки компаса и их осредняют.