 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Navigation
Определение места по пеленгам трех ориентиров
Способ получил широкое распространение, так как наряду с высокой точностью и надежностью требует минимальных по объему вычислительных и графических работ.
Для определения места судна необходимо иметь в видимости наблюдателя три нанесенных на карту ориентира.
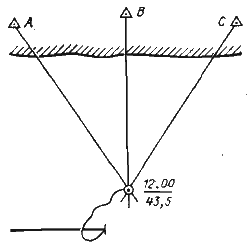
Сущность способа заключается в том, что в быстрой последовательности измеряют компасные пеленги на три ориентира и после исправления их поправкой компаса прокладывают на карте. Точка пересечения истинных пеленгов является обсервованным местом судна (рис. 73).
Однако, как правило, пеленги не пересекаются в одной точке, а образуют так называемый треугольник погрешности.
|
|
|
|
Рис. 73. Определение места |
Рис.
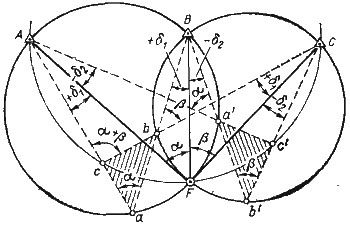
74. К доказательству свойств |
Причинами появления этих треугольников могут быть: промахи в наблюдениях, расчетах и графическом построении на карте; ошибки опознания ориентиров; ошибки в принимаемой поправке компаса; случайные ошибки пеленгования; неодновременность измерения пеленгов.
В результате влияния двух первых причин треугольник погрешности обычно имеет большие размеры. Наличие промаха легко обнаруживается повторными наблюдениями. Поэтому, получив треугольник значительных размеров, необходимо проверить расчеты и пеленгование ориентиров повторить. Если повторные наблюдения дают такой же результат, то нужно проверить правильность опознания ориентиров.
Влияние систематических ошибок. При отсутствии промахов и ошибок в опознании ориентиров наличие значительного по размерам треугольника погрешности является следствием влияния ошибки в принимаемой поправке компаса.
Пусть в результате пеленгования ориентиров А, В и С получены точные значения компасных пеленгов. После исправления безошибочной поправкой компаса истинные пеленги, проведенные на карте от соответствующих ориентиров, пересекутся в точке нахождения судна F (рис. 74). Если поправка компаса будет иметь положительную систематическую ошибку, то исправленные пеленги на карте образуют в пересечении треугольник abc. Однако, если систематическая ошибка в поправке компаса будет отрицательной, то пересечение пеленгов дает треугольник а'b'с' .
Во всех рассмотренных случаях углы между пеленгами, равные α и β, остаются неизменными, так как под действием систематической ошибки все пеленги разворачиваются в одну сторону на величину ошибки.
Постоянство горизонтальных углов между двумя ориентирами дает основание сделать выводы, что вершина каждого угла треугольника погрешности всегда располагается на окружности, вписывающей угол, образованный пеленгами на соответствующие ориентиры. Например, вершины треугольников погрешности а и а' находятся на окружности Ааа'В, вписывающей угол α, вершины b и Ь' — на окружности Bbb’C, вписывающей угол β, и вершины c и c' — на окружности Асc’С, вписывающей угол (α + β). Это очень важное свойство вершин треугольников погрешности используется для отыскания обсервованного места судна в случае недостоверной поправки компаса.
На рис. 74 видно, что место судна F лежит на пересечении дуг, соединяющих сходственные вершины углов треугольников погрешности. Под сходственными вершинами понимают вершины углов, образованных пеленгами на одни и те же ориентиры. Следовательно, если мы будем иметь два треугольника погрешности и проведем через сходственные вершины дуги окружностей, вписывающих углы между пеленгами, то они пересекутся в точке, являющейся обсервованным местом судна.
Если ошибка в поправке компаса не превышает 10°, то с точностью, достаточной для практики судовождения, дуги окружностей можно заменить прямыми, т.е. хордами.
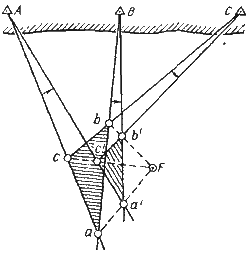
При определении места судна поступают следующим образом. Получив треугольник погрешности abc (рис. 75), сторона которого более 5 мм на путевой карте, считают, что он является результатом наличия систематической ошибки в поправке компаса. Поэтому учитываемую поправку компаса изменяют на 2 — 4° в любую сторону и исправляют ей измеренные компасные пеленги на ориентиры. Вторичная прокладка от ориентиров новых значений исправленных пеленгов дает на карте второй треугольник погрешности а’b’с’ . Соединяют сходственные вершины треугольников прямыми линиями и в их пересечении F получают уточненное место судна.
Действия по отысканию места судна этим способом получили название разгона треугольника погрешности.
При определении места по пеленгам трех ориентиров может встретиться случай неопределенности, когда все ориентиры и судно будут находиться на одной окружности. В этих условиях независимо от величины и знака систематической ошибки все пеленги будут пересекаться в одной точке. Следовательно, выявить наличие систематической ошибки и получить место судна, свободное от ее влияния, невозможно.
Влияние случайных ошибок. Исходя из свойств случайных ошибок можно сделать вывод, что их влияние на определение места судна будет проявляться в образовании небольших по размерам треугольников погрешности. Поэтому, получив треугольник со стороной менее 5 мм или 0,5 мили на путевой карте, считают его результатом действия случайных ошибок. Место судна в этом случае принимается в центре треугольника, если он равносторонний. Если же треугольник вытянутый, то место намечают внутри него ближе к малой стороне.
Влияние неодновременности измерения пеленгов. При плавании на путевых картах со скоростью менее 12 уз влияние неодновременности наблюдений уменьшают соблюдением очередности пеленгования:
первыми пеленгуют ориентиры, расположенные на более острых и тупых курсовых углах;
|
|
|
|
Рис. 75. Определение места при наличии треугольника погрешности |
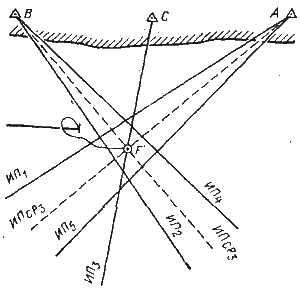
Рис. 76. Приведение пеленгов |
в последнюю очередь пеленгуют ориентиры, расположенные ближе к траверзу судна;
днем в плохую видимость и ночью первыми измеряют пеленги на ориентиры, наблюдение которых наиболее затруднено.
Если скорость судна более 12 уз или же плавание совершается на незначительных удалениях (2 — 3 мили) от ориентиров, то пеленги приводят к одному моменту. С этой целью измеряют пеленги, например, в следующей последовательности: КПA1 КПB2, КПC3, и далее вновь повторяют пеленгование первых двух ориентиров, но в обратном порядке, т. е. КПB4 и КПA5 (рис. 76). Считая, что за короткий промежуток времени пеленги изменяются линейно, рассчитывают их средние значения:
КПA3 = (КПA1 + КПA5)/2;
КПB3 = (КПB2+КПB4)/2.
Время и отсчет лага замечаются при измерении третьего пеленга на ориентир, в нашем примере КПC3.
Оценка точности. Рассмотренная ранее общая формула точности определения места судна (89) справедлива только для двух линий положения. Для оценки точности места судна, полученного по пеленгам трех ориентиров, используется формула
 (95)
(95)
где  — среднее
арифметическое значение из ошибок трех линий
положения;
— среднее
арифметическое значение из ошибок трех линий
положения;
[sin2θ]=sin2θ1+sin2θ2+sin2( θ1+ θ2),
θ1 = α; θ2 = β — углы между пеленгами. Градиент пеленга имеет выражение
g = 57,3°/D.
Используя формулу (92) и выражение градиента пеленга, получим ошибку линии положения
mлп==mи°D/57,3 β, (96)
где mи° — ошибка измерения пеленга;
D — расстояние до ориентира.
На основании выражения (96) будем иметь

где
Dср = (DA + DB + DC)/3.
Из формулы (95) видно, что ошибка определения места будет минимальной при углах 0, равных 60 или 120°. При определении места судна ориентиры выбирают так, чтобы углы 8 находились в пределах 30 — 150°. Если углы между пеленгами будут составлять 120°, то независимо от того, действуют ли случайные или систематические ошибки, место судна всегда будет внутри треугольника погрешности.
Порядок выполнения способа.
1. Подобрать на местности три ориентира, нанесенных на карту так, чтобы углы между пеленгами находились в пределах 30 — 150°.
2. Определить очередность пеленгования исходя из условий видимости и расположения ориентиров относительно диаметральной плоскости судна.
3. В порядке очередности быстро измерить компасные пеленги на ориентиры. При скорости судна более 12 уз или незначительных расстояний до ориентиров измерить пять пеленгов и первые два привести к моменту наблюдений третьего ориентира. Время и лаг заметить в момент третьих наблюдений.
4. Исправить компасные пеленги поправкой компаса и проложить на карте в порядке их измерения.
5. При получении большого треугольника погрешности проверить записи пеленгов, их исправление и прокладку на карте. Если ошибка не обнаружена, то повторить наблюдения. В случае сохранения треугольником своих размеров после повторных наблюдений проверить опознание ориентиров на местности.
6. При получении треугольника погрешности со стороной менее 5 мм или 0,5 мили на путевой карте принять место в центре его, если он равносторонний. В других случаях место намечать ближе к малой стороне треугольника.
7. Если получен треугольник погрешности со стороной более 5 мм (0,5 мили), который при повторных наблюдениях сохраняет свою ориентировку на карте, поступить одним из двух способов:
а) рассчитать два горизонтальных угла между измеренными компасными пеленгами и определить место судна с помощью протрактора или кальки;
б) изменить поправку компаса на 2 — 4° в любую сторону и после исправления пеленгов проложить их новые значения. Прямыми ли ниями соединить сходственные вершины треугольников погрешности и в пересечении их обозначить обсервованное место судна.