 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Navigation
Определение места по расстояниям
По двум расстояниям. Если в видимости судоводителя находятся два ориентира А и В, высота которых известна, то, определив с помощью секстана расстояния до них Da и Db, можно получить обсервован-ное место судна (рис. 83).
Дуги окружностей, проведенные радиусами Da и Db от соответствующих ориентиров, пересекутся на карте в точках F и F', в одной из которых будет находиться судно. В этом случае обсервован-ная точка распознается либо по счислимому месту судна, либо по приближенному пеленгу на один из ориентиров.
Для того чтобы исключить влияние на место судна разновременности наблюдений, первым измеряют вертикальный угол на ориентир, находящийся ближе к траверзу. Если этого недостаточно, то прибегают к приведению наблюдений к одному моменту. Выполняется это аналогично приведению к одному моменту двух пеленгов.
Измерения расстояний сопровождаются влиянием случайных и систематических ошибок. Отсутствие третьей контрольной линии положения не позволяет обнаружить ошибок и промахов в измерениях.
По этой причине к определениям места судна по двум расстояниям необходимо относиться с большой осторожностью. Рекомендуется выполнить несколько обсерваций с небольшими интервалами по времени и проанализировать их соответствие курсу и скорости судна.
С учетом того, что градиент расстояния g = 1, радиальная ошибка определения места этим способом может быть рассчитана по формуле
 (104)
(104)
где mD1 и mD2 — ошибки измерения расстояний до ориентиров; θ — угол между линиями положений.
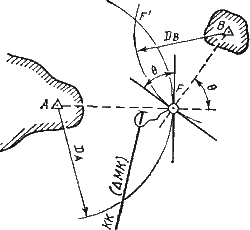
Рис. 83. Определение места по двум расстояниям
На рис. 83 видно, что угол θ равен углу между пеленгами на ориентиры.
Следовательно, точность определения места зависит от точности измерения расстояний и угла пересечений линий положения. Ошибка будет минимальной при θ = 90°.
Практическое выполнение способа.
1. Подготовить секстан к наблюдениям. Определить поправку индекса.
2. Подобрать ориентиры для наблюдений согласно приведенным рекомендациям.
3. Измерить вертикальные углы, начиная с ориентира, расположенного ближе к траверзу судна. В случае задержки с измерением второго вертикального угла повторить наблюдения по первому ориентиру и отсчеты секстана (ос) привести к одному моменту oc = (oc1+oc2)/2. Время и лаг заметить после вторых наблюдений.
4. Исправить отсчеты секстана вертикальных углов суммарной поправкой
(i + s) и рассчитать расстояния до ориентиров.
5. Провести на карте от соответствующих ориентиров, как из центров, отрезки пересекающихся дуг радиусами, равными рассчитаннымрасстояниям.
6. Обозначить обсервованное место судна в точке пересечения дуг, ориентируясь на счислимое место или приблизительный пеленг.
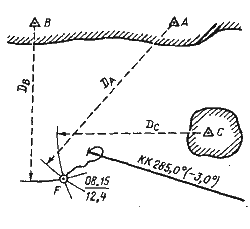
По трем расстояниям. Способ имеет высокую точность и получил широкое распространение с появлением радиолокации на судах. Для применения его необходимо иметь три ориентира, нанесенных на карту, до которых возможно измерить расстояния. При отсутствии ошибок все три изолинии, являющиеся дугами окружностей, пересекутся в одной точке F (рис. 84). Однако чаще всего пересечения изолиний образуют треугольник погрешности.
В данном способе образование фигуры погрешности и ее размеры являются следствием влияния тех же причин, что и в способе трех пеленгов. Поэтому порядок анализа и действий при получении треугольника погрешности аналогичны рас-
|
|
|
|
Рис. 84. Определение места по трем расстояниям |
Рис. 85. Определение места при наличии систематической ошибки |
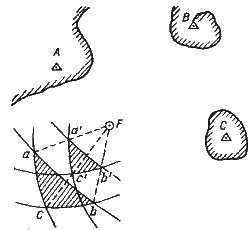
смотренным в § 31. В случае необходимости разгона треугольника все измеренные расстояния изменяют в одну сторону на одну и ту же произвольную величину и вторично прокладывают на карте. Соединив прямыми сходственные вершины треугольников погрешности, получают в их пересечении обсервованное место судна (рис. 85).
Влияние неодновременности наблюдений на точность определения места уменьшают соблюдением порядка измерений расстояний и приведением их к одному моменту. С этой целью, закончив наблюдения, повторяют измерения расстояний до второго и первого ориентиров и результаты осредняют. Время и отсчет лага замечают в момент измерения расстояния до третьего ориентира. Порядок практического выполнения способа отличается от способа по двум расстояниям только увеличением количества наблюдений.
Для оценки точности места судна, определенного данным способом, можно использовать формулу (95). При выборе ориентиров для наблюдений желательно, чтобы углы θ были равны 60 или 120°. Допустимыми пределами углов являются 30 — 150°.