 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Navigation
Особенности использования гирокомпаса в навигации
Принцип работы гироскопического компаса основан на свойстве свободного гироскопа удерживать направление своей оси в мировом пространстве. Однако вследствие вращения Земли направление истинного меридиана меняет свое положение в пространстве со скоростью, зависящей от положения точки на земной поверхности. Поэтому в гирокомпасе имеется специальное приспособление, которое заставляет ось гироскопа прецессировать со скоростью вращения плоскости истинного меридиана.
На движущемся судне ось чувствительного элемента гирокомпаса стремится занять положение не в истинном меридиане, а в гироскопи-ческим под некоторым углом к истинному меридиану δV, называемым скоростной девиацией (погрешностью). В силу ряда механических и технических причин ось чувствительного элемента гирокомпаса занимает это положение не точно, а находится под некоторым углом А к гироскопическому меридиану.
Вертикальная плоскость, проходящая через главную ось (0 — 180°) чувствительного элемента гирокомпаса, называется плоскостью гиро-компасного меридиана. В пересечении с плоскостью истинного горизонта эта плоскость дает гирокомпасный меридиан. Угол между плоскостью истинного меридиана и гирокомпасным меридианом называется поправкой гирокомпаса (ΔГК).
Как видно из вышеуказанных рассуждений, поправка гирокомпаса складывается из двух величин: скоростной девиации δV и постоянной на всех курсах поправки А
ΔГК =δV +Δ (31)
Скоростная девиация, зависящая от истинного курса, скорости судна и широты места, определяется по выражению
 (32)
(32)
где V — скорость судна;
R — радиус земного шара;
ω — угловая скорость вращения Земли.
Если в (32) выразить V в узлах и подставить значение R и ω, то с учетом малости величины δV получим, что
 (33)
(33)
Во многих типах гирокомпасов скоростная девиация автоматически исключается из показаний с помощью специального устройства — корректора. В этом случае поправка гирокомпаса остается постоянной на всех курсах и равна А.
У гирокомпасов типа «Амур», используемых на судах Минречфлота, в комплекте не предусмотрен корректор, поэтому величину δV находят с помощью специальной линейки или выбирают из таблиц по φ, ИК и V. В табл. 1 приведены величины скоростной девиации для скорости 10 узлов и диапазона широт от 30 до 70° в зависимости от гирокомпасного курса.
Для других значений скорости судна выбранную из таблицы величину необходимо умножить на 0,1 V.
Все направления, измеренные относительно гирокомпасного меридиана, называют гирокомпасными (гирокомпасный курс ГКК, гирокомпасный пеленг ГКП). Соотношения между истинными и гирокомпасными направлениями (рис. 22) определяются по алгебраическим фор-
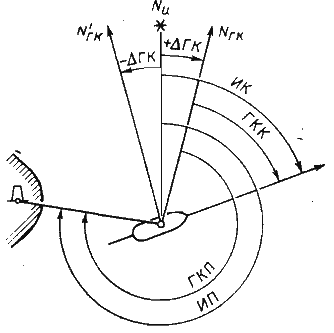
Рис. 22. Гирокомпасные направления
мулам, аналогичным формулам (26) и (27), при использовании магнитного компаса:
|
|
(34) |
|
|
(35) |
Поправку гирокомпаса определяют такими же способами, что и АМК (см. § 10), сравнивая истинные и гирокомпасные направления,
| Δгк=ип — гкп, |
|
|
(36) |
|
| Δгк=ик — гкк. |
|
После определения АГК необходимо вычислить ее постоянную часть. Для этого выбирают из таблиц 6у на данный курс и вычисляют А по формуле
Δ=ΔГК — δV. (37)
В дальнейшем для других курсов АГК рассчитывают по выражению (31), предварительно определив 6у по линейке или таблице.
При маневрировании судна под воздействием ускорений гирокомпас выходит из гироскопического меридиана на некоторый угол, появляются так называемые инерционные погрешности первого и второго рода. После маневра эти погрешности постепенно уменьшаются и гирокомпас снова приходит в меридиан.
Для уменьшения влияния инерционных погрешностей на точность судовождения рекомендуется определять место с использованием гирокомпаса и поправку компаса не ранее 10 — 15 мин после поворота.
Гирокомпас на судах смешанного плавания является основным курсоуказателем.
Таблица 1
| Курс по гирокомпасу ГКК | Широта φ° | |||||||||
| - | + | + | - | 30 | 40 | 50 | 55 | 60 | 65 | 70 |
| 0 | 180° | 180° | 360° | 0,7° | 0,8° | 1,0° | 1,1° | 1,3° | 1.5° | 1,9° |
| 10 | 170 | 190 | 350 | 0,7 | 0,8 | 1,0 | 1,1 | 1,2 | 1,5 | 1,8 |
| 20 | 160 | 200 | 340 | 0,7 | 0,8 | 0,9 | 1,0 | 1,2 | 1,4 | 1,8 |
| 30 | 150 | 210 | 330 | 0,6 | 0,7 | 0,9 | 1,0 | 1,1 | 1,3 | 1,6 |
| 40 | 140 | 220 | 320 | 0,6 | 0,6 | 0,8 | 0,8 | 1,0 | 1,2 | 1,4 |
| 50 | 130 | 230 | 310 | 0,5 | 0,5 | 0,6 | 0,7 | 0,8 | 1,0 | 1,2 |
| 60 | 120 | 240 | 300 | 0,4 | 0,4 | 0,5 | 0,6 | 0,6 | 0,8 | 0,9 |
| 70 | 11О | 250 | 290 | 0,2 | 0,3 | 0,3 | 0,4 | 0,4 | 0,5 | 0,6 |
| 80 | 100 | 260 | 280 | 0,1 | 0,2 | 0,2 | 0,2 | 0,2 | 0,3 | 0,3 |
| 90 | 90 | 270 | 270 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 | 0,0 |
Точность его показаний несколько выше, чем у магнитного компаса, особенно на качке. Главное же преимущество гирокомпаса в том, что его поправка в процессе эксплуатации более стабильна, чем девиация магнитного компаса. Надежность работы гирокомпаса как сложного электромеханического устройства во многом зависит от уровня технического обслуживания. В процессе эксплуатации у гирокомпаса могут возникать различные неисправности, вследствие которых иногда показания его становятся ошибочными. Обнаружить подобные неисправности обычно нелегко, поэтому необходимо систематически определять АГК и производить сличение показаний гирокомпаса с магнитным компасом.