 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Ship’s auxiliary engines
Средства активного управления
Средства активного управления (САУ) предназначаются для улучшения управляемости судов на малой скорости, когда рулевые устройства становятся неэффективными. Средства активного управления подразделяют на две группы. В первую входят САУ, работающие совместно с главными движителями. К ним относятся крыльчатые движители, устанавливаемые под днищем судна и способные создавать упор в любом направлении. Несмотря на свои достоинства, крыльчатые движители не получили распространения из-за своей уязвимости и сложности конструкции. Поворотные колонки с гребным винтом, устанавливаемым в насадке, работают также с главными движителями. При установке на малых судах они обеспечивают высокую маневренность благодаря изменению направления упора в диапазоне 3609. Наибольшее распространение на морских судах получили поворотные направляющие насадки (рис. 75), представляющие собой профилированное кольцо /, опирающееся на штырь пятки 4 ахтерштевня и присоединенное к баллеру с помощью фланцевого соединения 3. При повороте насадки отбрасываемая гребным винтом струя изменяет направление и происходит поворот судна. Стабилизатор 2 повышает устойчивость на курсе. Насадка заменяет руль, повышает упор гребного винта и обеспечивает лучшую поворотливость судна.
САУ второй группы называют подруливающими устройствами. К ним относятся активные рули, выдвижные винтовые колонки и подруливающие устройства туннельного типа.
Активный руль представляет собой небольшой винт с насадкой, установленный на задней кромке пера руля. Приводной электродвигатель располагается в утолщенной части пера руля, питание к нему подается через полость в баллере. В другом варианте электродвигатель располагается в румпельном отделении, а передача к винту осуществляется через валик, проходящий в полости баллера, и коническую зубчатую передачу, размещаемую в утолщении пера руля. При переложенном на борт руле вспомогательный винт создает момент, поворачивающий судно даже при застопоренных двигателях.
Выдвижная винтовая колонка (рис. 76) состоит из гребного винта / и направляющей насадки 2, установленных на баллере 3. Привод винта осуществляется от электродвигателя 8 через муфту 7, редуктор 6, вал 9
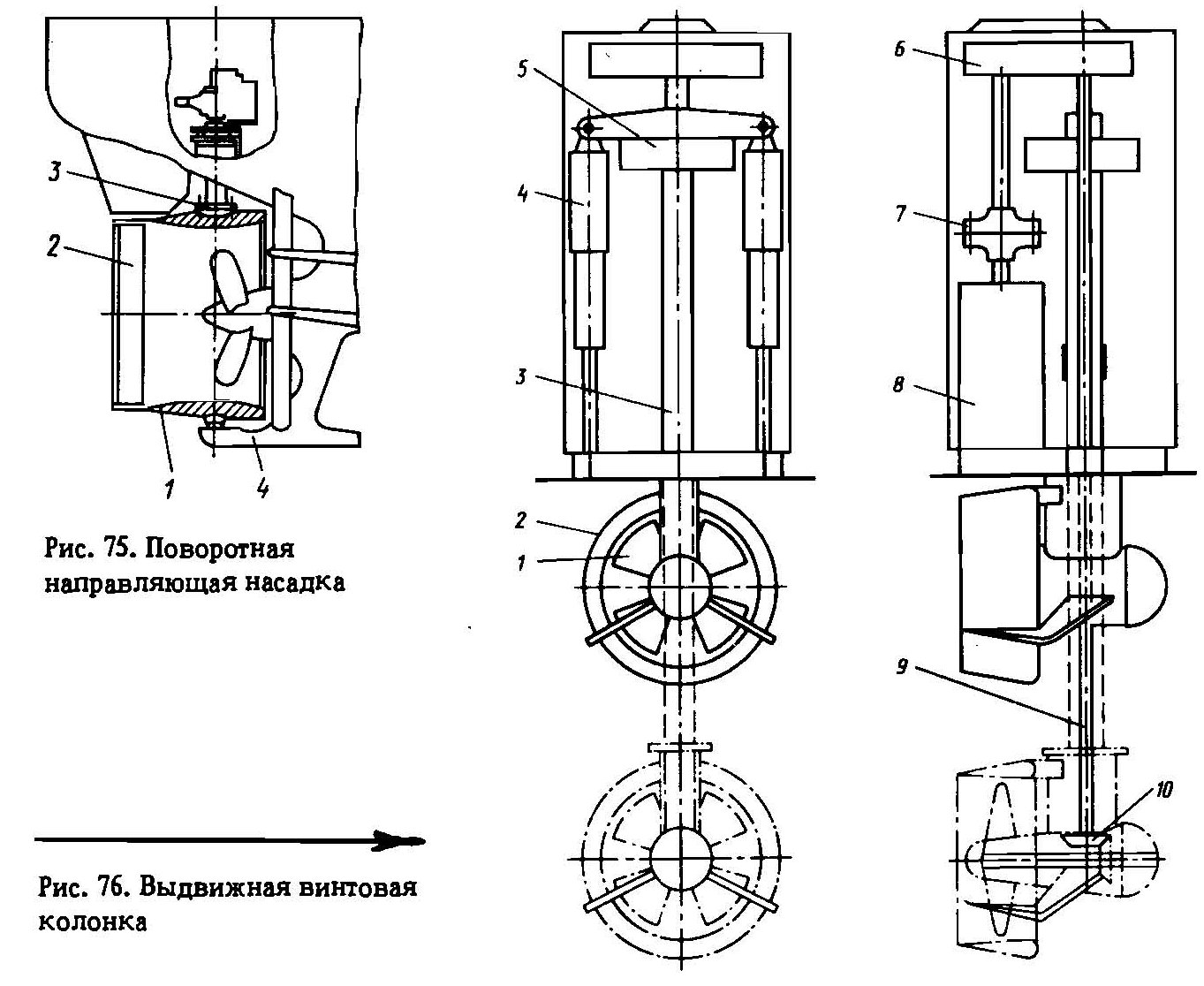
и коническую зубчатую передачу 10. Винт может поворачиваться на 360° с помощью привода 5, находящегося в шлицевом зацеплении с валом 9. В рабочее положение баллер и винт выдвигаются посредством двух телескопических гидроцилиндров 4, воздействующих на траверсу. В нерабочем положении рулевая колонка не выступает за пределы обводов корпуса.
Подруливающие
устройства туннельного типа в отличие от сложного и недостаточно
надежного активного руля и рулевой колонки, выступающей в рабочем
положении за пределы корпуса, не имеют этих недостатков и получили
на морских судах наибольшее распространение. Устройство (рис. 77)
состоит из гребного винта регулируемого или фиксированного шага,
расположенного в поперечном канале, размещенном ниже ватерлинии,
обычно в носовой части судна. В прямом канале привод винта
осуществляется через угловую зубчатую передачу (рис. 77, о). При
использовании S-образного канала (рис. 77, б) не нужна промежуточная
передача. В Т-образном канале (рис. 77, в) приводной вал
располагается вертикально. Поток воды в горизонтальный канал
нагнетается через водозаборник винтом или насосом. В этом случае
используется ВФШ или осевой насос с нереверсивным приводным
двигателем, а направление потока изменяется с помощью заслон-
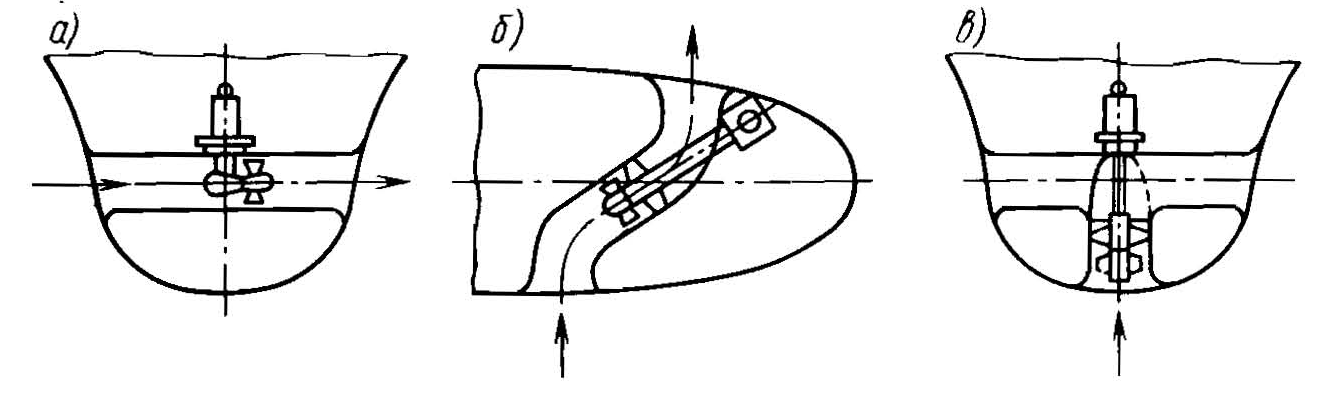
Рис. 77. Подруливающие устройства туннельного типа
ки. В качестве приводного двигателя могут быть использованы двигатель внутреннего сгорания, электродвигатель или гидромотор.
Рассмотрим наиболее распространенный вариант подруливающего устройства с прямым каналом и ВРШ, установленного на судах типа "Скульптор Коненков". Четырехлопастный винт с поворотными лопастями (ВПЛ) 1 (рис. 78) находится в туннеле, представляющем собой стальную трубу диаметром 2,5 м, расположенную в носовой части судна перпендикулярно диаметральной плоскости. ВПЛ приводится электродвигателем 12 через эластичную муфту 13 и коническую зубчатую передачу 14, корпус которой установлен в туннеле на кронштейнах.
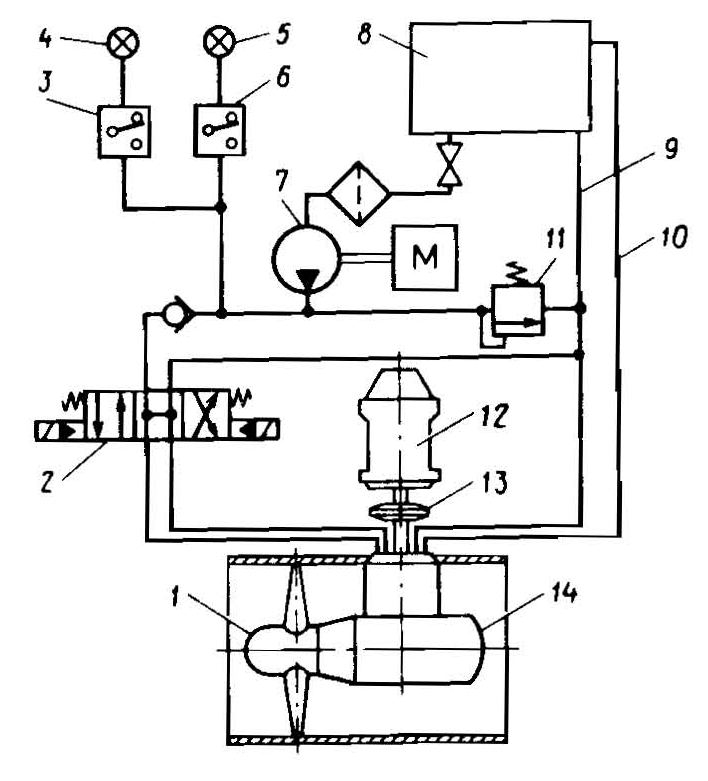
Рис. 78. Гидравлическая система управления ВПЛ
В ступице ВПЛ / расположен сервопоршень, при перемещении которого происходит изменение шага винта. Нагнетание масла в полости сервоцилиндра осуществляется насосом 7 через электрогидравлический золотниковый распределитель 2. Давление масла в системе может изменяться от 1,0 до 4,5 МПа, при этом контакты реле давления 3 замкнуты и горящая зеленая лампа 4 сигнализирует о нормальном давлении в системе. При падении давления ниже 1,0 МПа срабатывает реле давления 6 и загорается красная лампа 5. Реле давления 6 блокирует запуск электродвигателя 12 ВПЛ. При повышении давления до 5 МПа срабатывает предохранительный клапан //.Масляный бак 8 оборудован электроподогревателем, управляемым термостатом.Подогреватель должен работать все время, пока судно находится на ходу. Корпус 14 привода заполняется маслом по трубопроводу 9. Во избежание проникновения воды в корпус 14 при нарушении герметичности уплотнений вала давление масла несколько превышает давление воды ввиду расположения бака 8 на 3 м выше грузовой ватерлинии. Трубопровод 10 является расширительным для корпуса 14.
Управление подруливающим устройством (рис. 79) может осуществляться с одного из трех пультов, расположенных на мостике, или с пульта в машинном отделении. Релейный блок / включает один из пультов 2, 3 мостика, блокируя остальные. Кнопка 4 в ЦПУ служит для переключения управления на мостик или в машинное отделение. Из машинного отделения управление ВПЛ осуществляется нажатием одной из кнопок 5, замыкающих цепь управления соответствующего электромагнита золотникового распределителя. Кнопка удерживается, пока по указателю угла поворота лопастей не будет зафиксировано их нужное положение.
Пульт управления на мостике состоит из сельсина-датчика 2 и сельсина-приемника / системы указателя шага винта. При повороте
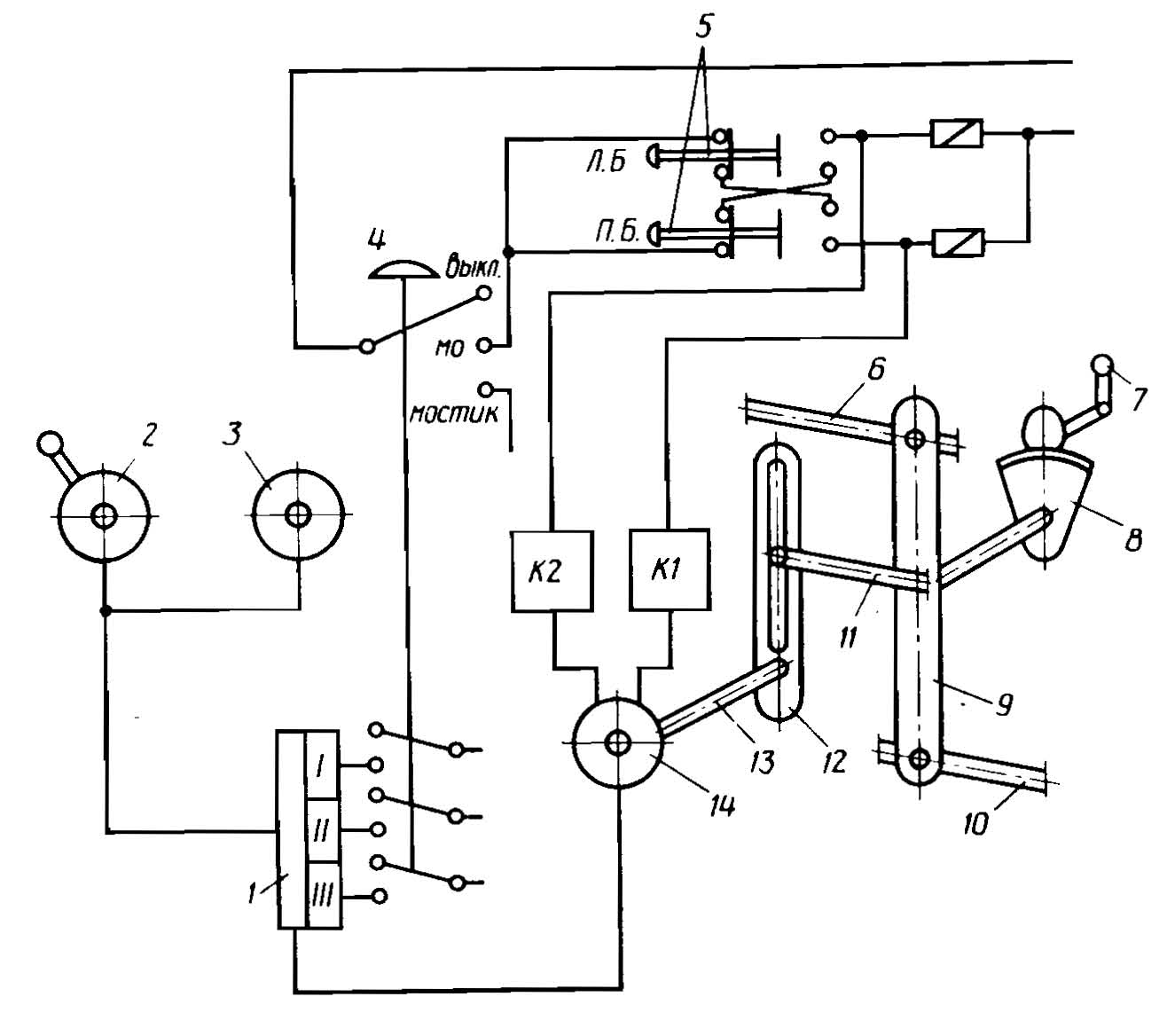
Рис. 79. Схема управления подруливающим устройством
рукоятки сельсина-датчика 2 электрический сигнал, пропорциональный заданному углу поворота лопастей, поступает на вращающийся трансформатор 14 и в зависимости от стороны перекладки - на реле К1 или К2. Реле замыкает контакты цепи управления и включает соответствующую позицию золотникового распределителя. При изменении шага винта шток сервопоршня через систему обратной связи, шток 10, рычаг 9 и шток 6 воздействует на золотник, смещая его к средней позиции. Одновременно рычаги 11 и 12 к шток 13 возвращают вращающийся трансформатор 14 к нулевому положению, после достижения которого цепь управления размыкается, золотниковый распределитель занимает среднюю позицию и по обе стороны сервопоршня ВПЛ устанавливается одинаковое давление. Управление из машинного отделения и с местного поста с помощью рукоятки и сектора 8 считается аварийным.
При подготовке подруливающего устройства к действию необходимо проверить состояние гидросистемы и электрооборудования и включить электродвигатель насоса 7 (см. рис. 78). При достижении рабочего давления в гидросистеме гаснет сигнальная лампа 5. Запуск электродвигателя 12 возможен только после установки ВПЛ в положение нулевого шага. Перед выходом судна в море ВРШ опробуется в работе путем выполнения перекладок во всем рабочем диапазоне со всех постов управления. При этом проверяются согласование показаний указателей шага и исправность элементов электрооборудования и гидропривода. Продолжительность работы электропривода с номинальной нагрузкой не должна превышать 30 мин. Не рекомендуется" работа ВРШ при скорости судна более 3 уз, при плавании во льду, а также длительная работа при нулевом шаге.