 |  |
phone: +7 495 1087345 fax: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



RUSSIAN language only:
Ship’s auxiliary engines
Принцип действия гидросистемы управления ВРШ
Принцип работы гидравлической системы управления винтом регулируемого шага показан на рис. 55. Гидравлическая система состоит из силовой части, которая используется для перемещения лопастей винта для увеличения или уменьшения шага, и управляющей части для перемещения исполнительных механизмов, которые управляют положением главного распределительного золотника силовой части системы управления.
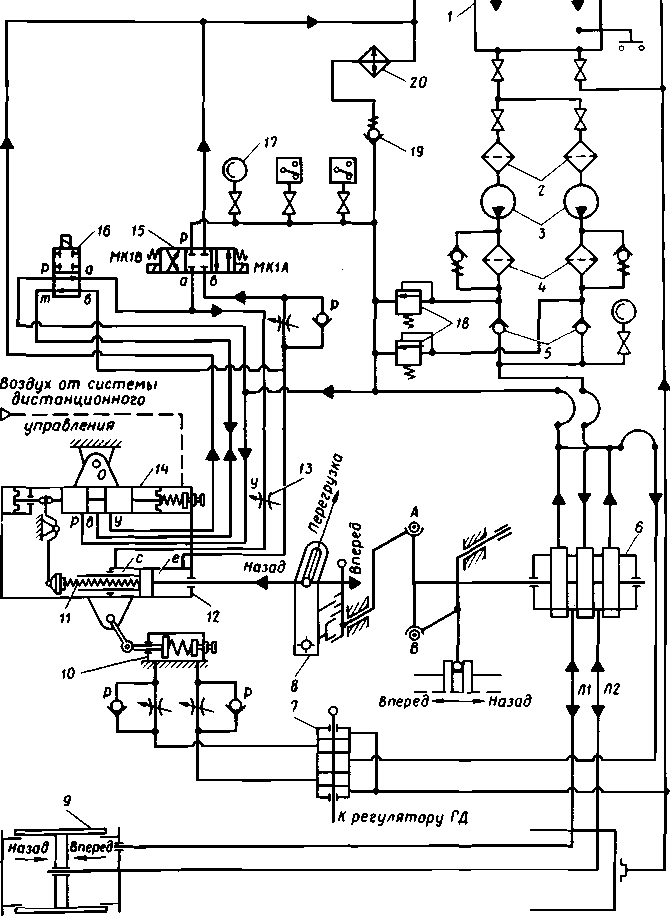
Рис. 55. Гидравлическая система управления ВРШ
Силовая часть системы использует масло из бака /, поступающее к насосам 3 через фильтры 2 и нагнетаемое под давлением 8 МПа. Управляющая часть использует масло сливного трубопровода, в котором с помощью регулирующего клапана 19 поддерживается давление порядка 0,5 МПа. Масло, нагнетаемое насосом, проходит фильтры 4, невозвратные клапаны 5 и поступает к главному распределительному золотнику 6. Если золотник 6 находится в нейтральном положении, то все масло перепускается переливными клапанами 18 в сливную магистраль. После заполнения сливного трубопровода и всех его элементов избыток масла сбрасывается в сборный танк через регулирующий клапан 19 и маслоохладитель 20. Давление в сливной магистрали контролируется манометром 17.
Допустим, необходимо из положения нулевого шага дать передний ход. В этом случае с помощью пневмозадатчика, установленного на посту управления (см. Рис. 54), давление управляющего воздуха в камере исполнительного механизма системы дистанционного управления уменьшится до значения, соответствующего заданному ходу. Понижение давления управляющего воздуха вызывает перемещение управляющего золотника 14 (см. рис. 55) вправо, каналы в и у гидравлической системы сообщаются. Масло из сливной магистрали под давлением 0,5 МПа через каналы р и а электромагнитного клапана 16 и регулируемый дроссельный клапан 13 поступает в полость с гидроусилителя 12. Поршень гидроусилителя начинает перемещаться вправо, вытесняет масло из полости е через каналы вит электромагнитного клапана 16 и далее через сообщенные каналы в и у на управляющем золотнике в сборный бак. Одновременно с перемещением поршня гидроусилителя вправо происходит ослабление усилия сжатия в пружине обратной связи к управляющему золотнику и начинается поворот углового рычага на механизме изменения шага против часовой стрелки. При этом под воздействием давления воздуха управляющий золотник перемещается влево и разобщаются каналы в и у. Масло оказывается запертым теперь в полости е гидроусилителя, и дальнейшее перемещение поршня прекращается.
Поршень гидроусилителя связан тягой с вертикальным рычагом 8, который будет поворачивать двухколенный вал с двумя свободными точками А и В. При перемещении гидроусилителя вал поворачивается относительно неподвижной точки В (в данном случае по часовой стрелке при перемещении поршня гидроусилителя вправо). Главный распределительный золотник 6, соединенный с кривошипным механизмом, смещается также вправо. Теперь масло под высоким давлением начинает поступать в интегральный сервомотор 9 по каналу Л1 и поворачивать лопасти винта на передний ход до тех пор, пока система механической обратной связи не переместит кривошипный механизм вращением его теперь уже относительно неподвижной точки А, а вместе с ним и главный распределительный золотник в нейтральное положение. Лопасти винта установились в заданном положении, а система управления находится в новом равновесном состоянии. Если задается задний ход, то давление управляющего воздуха в камере исполнительного механизма дистанционного управления повысится до значения, соответствующего заданному ходу, что вызывает перемещение управляющего золотника влево и каналы р и в сообщаются. Так как к каналу р подводится масло под давлением 0,5 МПа, то оно проходит в канал в золотника управления и через каналы виг электромагнитного клапана 16 поступает в полость е гидроусилителя. Несмотря на то что и к полости с подведено масло с таким же давлением, поршень гидроусилителя начинает перемещаться влево, так как площадь поршня со стороны полости е больше, чем со стороны полости с. Масло вытесняется из полости с через дроссельный клапан 13 обратно в сливную магистраль. Одновременно с перемещением поршня гидроусилителя влево происходит увеличение усилия сжатия в пружине 11 обратной связи к управляющему золотнику и поворот углового рычага на механизме изменения шага по часовой стрелке. Увеличивающееся усилие в пружине обратной связи превышает воздействие давления управляющего воздуха и поэтому управляющий золотник возвращается в нейтральное положение, разобщая каналы р и в. Масло, запертое в полости е гидроусилителя, прекращает дальнейшее перемещение поршня гидроусилителя.
При перемещении углового рычага 8 начинается вращение кривошипного механизма против часовой стрелки относительно неподвижной точки В. Главный распределительный золотник смещается влево. Масло силовой части начинает поступать в интегральный сервомотор 9 по каналу Л2 и поворачивать лопасти винта на задний ход до тех пор, пока система обратной связи не переместит кривошипный механизм, а вместе с ним и главный распределительный золотник в нейтральное положение. Лопасти винта установились в заданное положение, а система управления находится в новом равновесном состоянии.
При уменьшении
давления управляющего воздуха в системе дистанционного управления
управляющий золотник под воздействием пружины обратной связи
начинает перемещаться вправо, каналы в и у сообщаются и масло
начинает вытесняться из полости е гидроусилителя благодаря
поступлению масла в полость с, которая постоянно сообщена с
управляющей полостью гидравлической системы. Несмотря на ослабление
пружины обратной связи, управляющий золотник в нейтральное положение
не возвращается из-за отсутствия давления управляющего воздуха. Для
того чтобы лопасти винта не повернулись на полный конструктивный шаг,
следует включить аварийное управление на мостике. При этом
включении получает питание электромагнитный клапан 16, который
переключается и закрывает свои каналы. Масло теперь не может
поступать в полость с и вытесняется из полости е. Поршень усилителя
останавливается. Теперь для подачи масла к гидроусилителю следует
включать электромагнит МК1А клапана 15 (поворот лопастей на шаг
переднего хода) или электромагнит МК1В (поворот лопастей на шаг
заднего хода) и таким образом изменять положение лопастей на
требуемое значение.
Системой предусматривается автоматическое снятие перегрузки с главного двигателя в случае задания излишне большого шага винту или в случае неблагоприятных услоеий плавания и др. Контроль за нагрузкой двигателя выполняется регулятором частоты вращения ГД фирмы "Вудворд", в котором имеется устройство контроля заданной подачи топлива. Если фактическая подача топлива, определяемая частотой вращения центробежных грузов и затяжкой пружины регулятора, превышает заранее настроенное значение, то золотник контроля 7 смещается от центрального положения вверх. Масло от управляющей части гидравлической системы проходит через золотник контроля нагрузки 7 в левую полость цилиндра перегрузки 10. Наполнение левой полости цилиндра ^происходит при максимальном давлении без дросселирования в регуляторе потока Р. Слив же масла из правой полости происходит через регулирующий дроссель, что вызывает запаздывание снятия перегрузки. Это необходимо для предотвращения изменения шага при кратковременных перегрузках, возникающих во время ускорений судна, при волнении моря и других обстоятельствах. Наполнение левой полости цилиндра 10 вызывает перемещение его поршня вправо. При этом перемещении пневмогидравлический усилитель 14 вместе со штоком приобретает вращательное движение против часовой стрелки отнссительно точки опоры О. Опора штока гидроусилителя (точка F) перемещается вверх по прорези углового рычага, положение которого определяет значение угла поворота лопастей винта (шага винта) и тем самым уменьшает угол поворота углового рычага как для случая положения лопастей винта на передний ход, так и для случая положения на задний ход.
При снятии перегрузки с двигателя золотник контроля нагрузки 7 возвращается в нейтральнее положение, сохраняя цилиндр перегрузки в новом равновесном состоянии. Когда же нагрузка на двигатель вновь окажется меньше заданной, происходит перемещение золотника 7 в противоположном направлении и гидроусилитель со штоком возвращается в исходное состояние.