 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Судовые вспомогательные механизмы
Брашпили
По конструктивным особенностям привода и передачи брашпили подразделяются на три типа:
с редуктором, состоящим из червячной и цилиндрической ступеней, турачками на грузовом валу и одним приводным двигателем;
с редуктором, состоящим из конической и цилиндрических ступеней, турачками на промежуточном валу и одним приводным двигателем;
с редуктором, отличающимся от предыдущего тем, что вместо конической первая ступень выполнена цилиндрической с подводом мощности от двух электродвигателей.
Брашпиль первого типа (рис. 130) состоит из грузового вала, двухступенчатого редуктора и электродвигателя 13, имеющего встроенный

Рис. 130. Кинематическая схема брашпиля
нормально замкнутый дисковый тормоз 14 и закрепленного фланцем на корпусе редуктора.
Грузовой вал вращается в четырех подшипниках качения, два из которых 2 и 10 (Рис. 131 и 130) установлены в стойках фундаментной
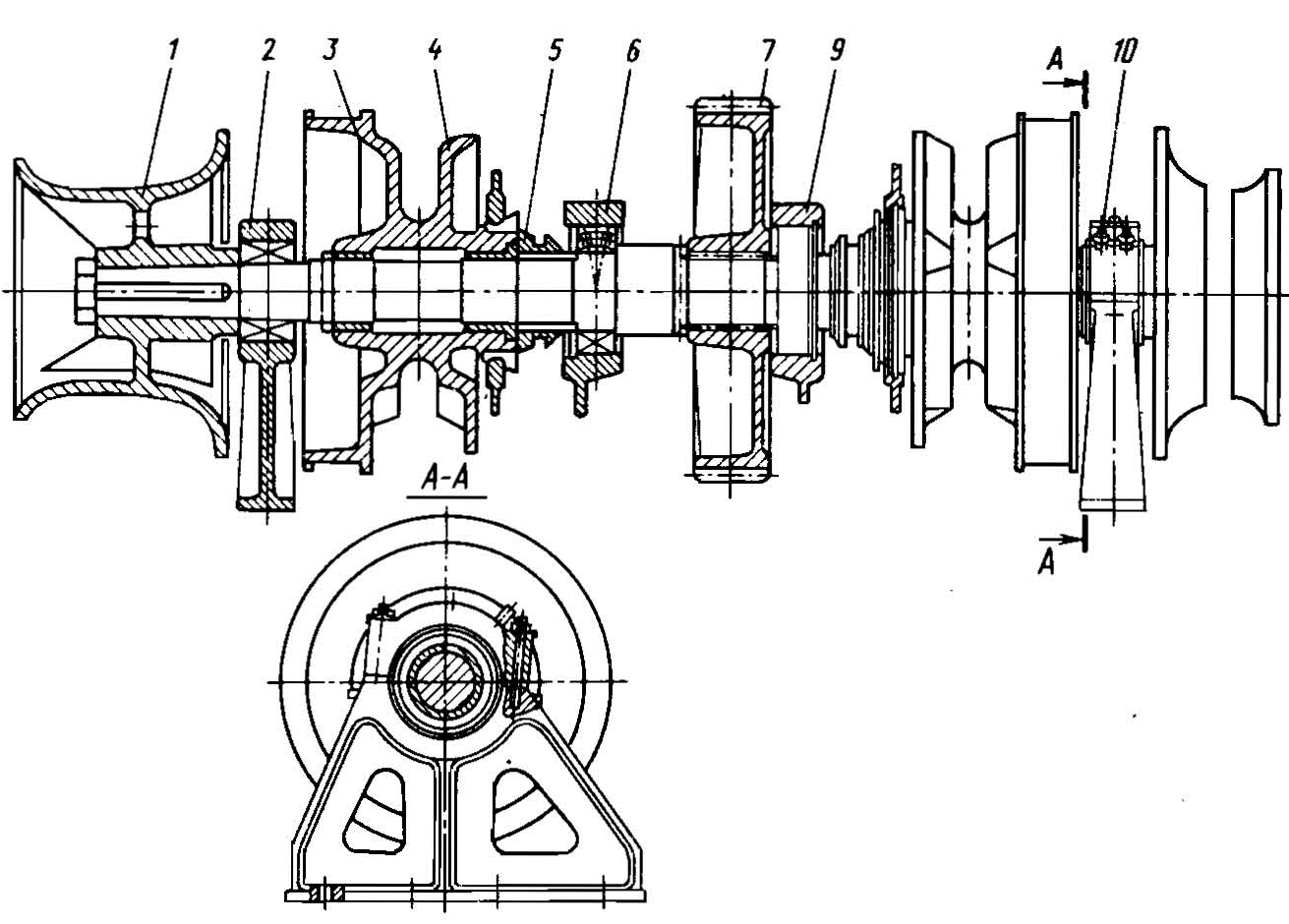
Рис. 131. Грузовой вал брашпиля (обозначение позиций такое же, как на рис. 130)
рамы и два - 6 и 9 - в корпусе редуктора. Вал получает вращение через эластичную муфту 12, червячную передачу 8 и цилиндрическую передачу 7 с приводным колесом, сидящим на грузовом валу 11. Звездочки 4 посажены на валу свободно на подшипниках скольжения и соединяются с ним кулачковыми муфтами 5. Ленточный тормоз 3 удерживает звездочку от вращения при выключенных муфтах 5. Турачки 1 установлены на шпонках и вращаются на всех режимах работы электродвигателя. Тормоза и муфты имеют ручное управление. Муфта включается поворотом маховика управления влево до отказа. Если при этом кулачки ведущей полумуфты не вошли во впадины полумуфты звездочки из-за несовпадения, грузовой вал следует стронуть электродвигателем в любую сторону и муфта включится под действием досылающих пружин. На звездочках установлены отбойники, предназначенные для отбивания звеньев цепи, заклинившихся между кулачками, и приводы указателей длины вытравленной цепи.
Выбранный якорь удерживается затянутым ленточным тормозом звездочки и включенными палубными стопорами. Для отдачи якоря электродвигателем снимают палубные стопоры, включают муфту и растормаживают ленточный тормоз звездочки, которая теперь удерживается дисковым тормозом электродвигателя до момента его включения. Другая муфта остается разобщенной, а ленточный тормоз удерживает ее звездочку относительно вращающегося вала. Аналогично производят отдачу второго якоря. Выбирание якоря выполняется при таком же положении органов управления. После его завершения затягивается ленточный тормоз звездочки и разобщается ее кулачковая муфта.
При отдаче якоря свободным травлением цепи муфты остаются выключенными, а управление отдачей осуществляется растормажива-нием ленточного тормоза и его подтормаживанием для регулирования скорости травления цепи.
Включение и выключение кулачковых муфт производятся при остановленном электродвигателе и заторможенных цепных звездочках.
Ленточный тормоз затягивают и отпускают при остановленном электродвигателе.
Электродвигатель включается при разобщенных муфтах и заторможенных звездочках или при включенных муфтах и расторможенных звездочках.
Брашпиль второго типа (рис. 132) с одной цепной звездочкой 11 и турачкой 2 на промежуточном валу редуктора приводится от электродвигателя через эластичную муфту 6. Редуктор брашпиля состоит из трех ступеней цилиндрических шестерен с винтовой нарезкой и одной ступени прямозубых шестерен. От шестерни 3, жестко сидящей на валу подвода мощности, через две пары сблокированных шестерен 1, 16 и 4, 5, свободно сидящих на валах, вращение передается на шестерни 15 и 7 промежуточного вала. Прямозубые колеса 7 и 8 образуют последнюю
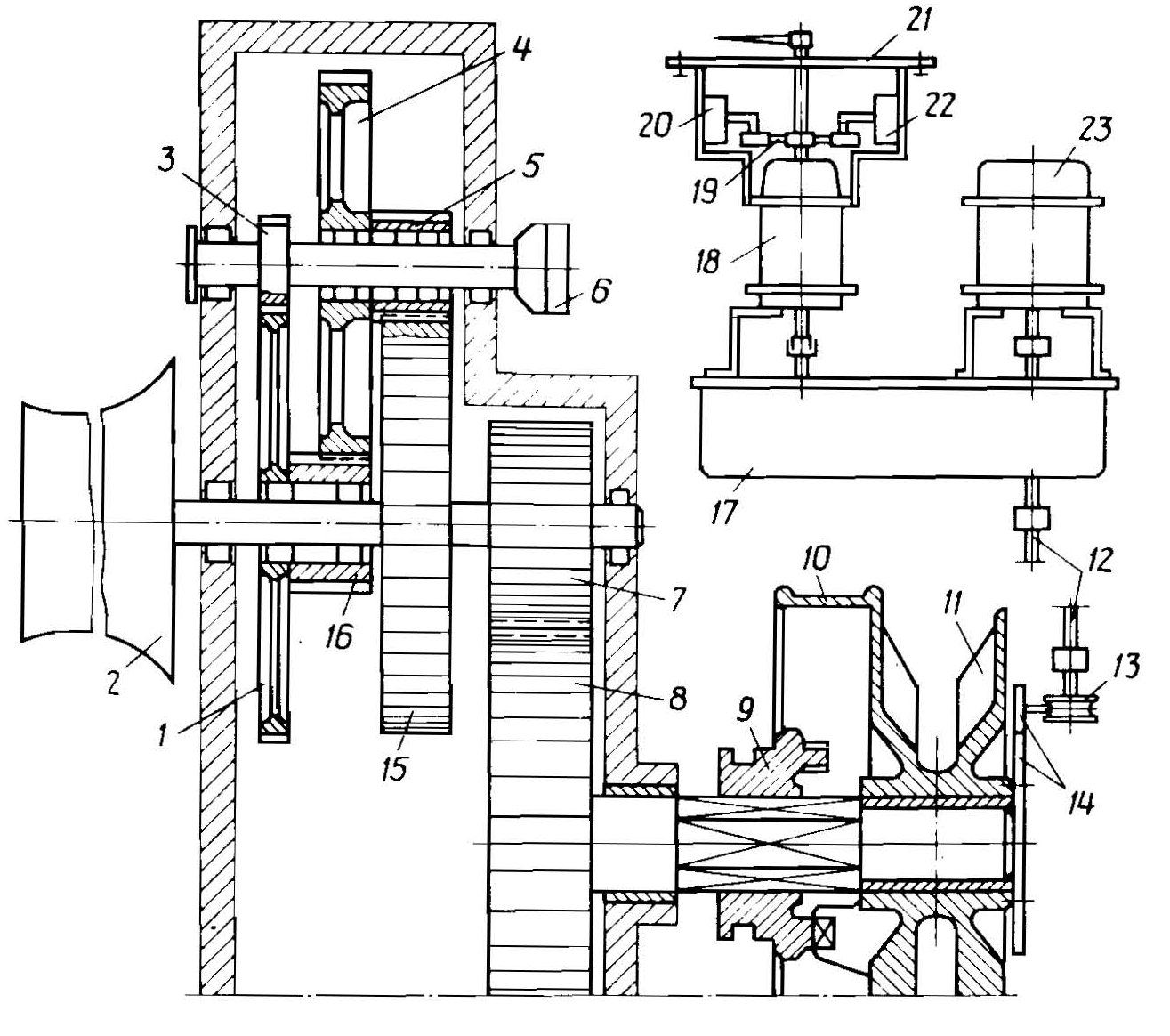
Рис. 132. Схема брашпиля с одной цепной звездочкой
ступень привода грузового вала, на котором свободно насажена цепная звездочка 77. Валы редуктора и свободно сидящие на них шестерни вращаются на подшипниках качения. Шестерни и их подшипники смазываются разбрызгиванием. Подшипники валов и звездочка 77 с тормозным шкивом 10 смазываются консистентной смазкой. Ведущая полумуфта 9 перемещается ручным приводом по шестигранному профилю грузового вала и своими кулачками входит в прорези полумуфты звездочки 77. При несовпадении кулачков и впадин их совмещают страгиванием рабочего вала электродвигателем и дожимают ручным приводом, так как муфта не имеет досылающих пружин.
Брашпиль снабжен счетчиком длины вытравленной цепи, привод которого осуществляется от звездочки 77 через цилиндрические шестерни 14 и червячную передачу 13, соединенную с гибким валом 12. Счетчик размещается в колонке переключателя управления, расположенной рядом с командоконтроллером. В корпусе колонки переключателя управления установлен тахогенератор 23, получающий вращение от гибкого вала 12. Функциями тахогенератора являются измерение скорости свободной отдачи якорь-цепи и управление электрогидравлической системой торможения с целью ограничения скорости отдачи, которая не должна превышать 5 м/с.
Параллельно с тахогенератором через редуктор 17 с большим передаточным числом приводится сельсин-датчик 18. Поворот его выходного вала и стрелки фиксирует на шкале 21 длину вытравленной цепи в метрах и смычках. Сельсин-датчик 18 электрической цепью связан с сельсином-приемником указателя длины вытравленной цепи, находящимся на мостике. Переключение управления с местного на дистанционное производится переключателем, расположенным на лицевой стороне колонки.
На выходном валике сельсина-датчика установлен кулачок 19, воздействующий при повороте валика на конечные выключатели 20 и 22, один из которых включает гидравлическую систему торможения звездочки при выходе из цепного ящика последнего звена цепи. Другой конечный выключатель автоматически переключает электродвигатель со II ступени скорости (18 м/с) на I (9 м/с) при втягивании якоря в клюз.
Тормозной шкив звездочки охвачен ленточным тормозом (рис. 133), который может управляться вручную маховиком 4 с местного поста управления или дистанционно с помощью гидроцилиндра 7. Один конец разрезной ленты 1 осью 10 соединен со штоком гидроцилиндра 7, две пружины которого смещают поршень вправо на затормаживание. Отдача тормоза происходит под воздействием давления масла. Другой конец тормозной ленты осью 6 соединяется со сдвоенным рычагом 5 и с
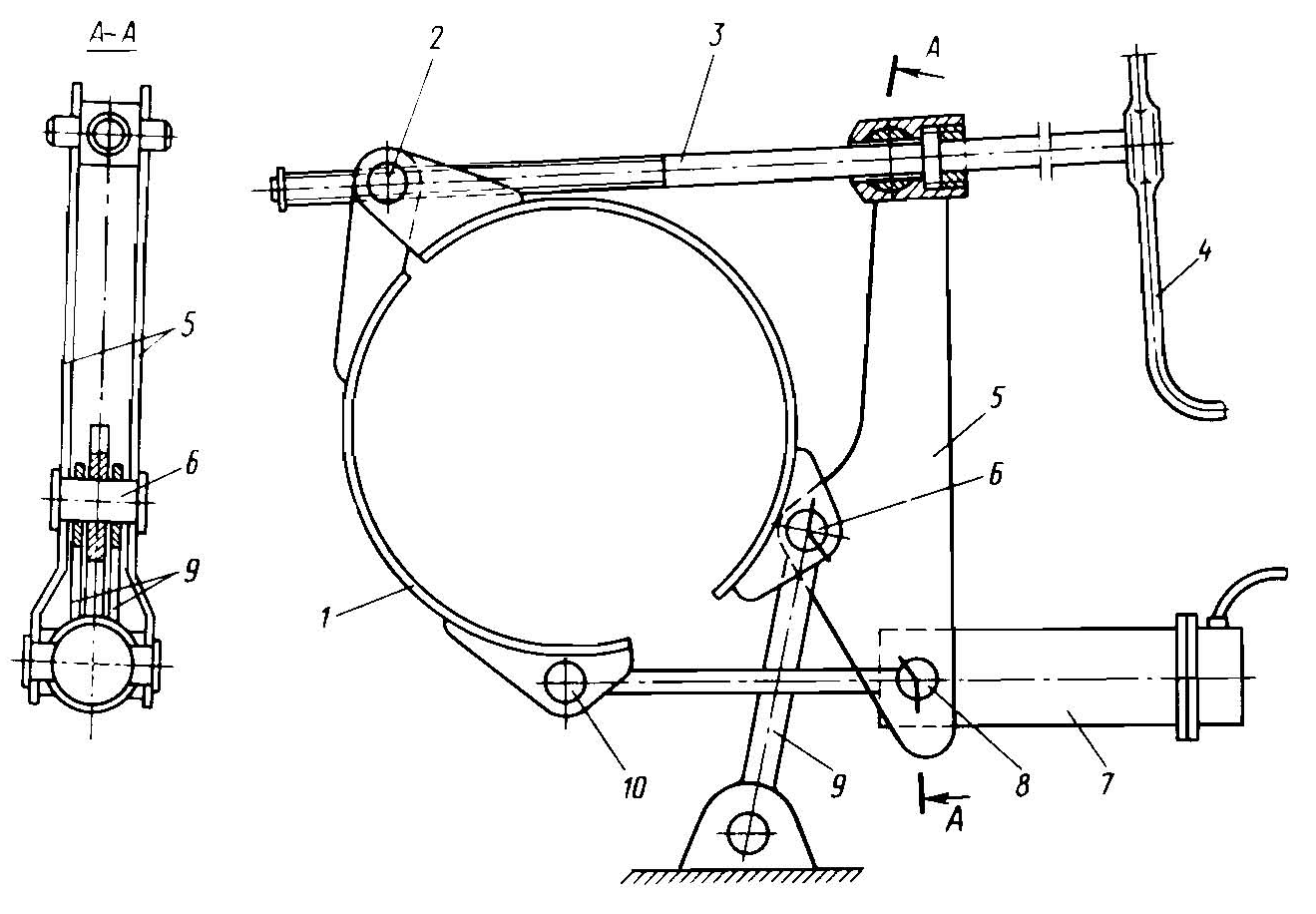
Рис. 133. Ленточный тормоз брашпиля
двумя шатунами 9. Рычаг 5 шарнирно установлен на цапфах 8 гидроцилиндра. При вращении маховика 4 вправо резьбовая часть тяги 3 ввертывается в гайку 2, верхний конец рычага 5 перемещается влево, поворачиваясь на цапфах 8 и прижимая ленту к тормозному шкиву. Шатуны 9 передают тормозное усилие на фундаментную раму. При вращении маховика 4 влево рычаг 5 ослабляет затяжку тормозной ленты.
Перед переходом на управление с помощью гидропривода, тормоз необходимо затянуть ручным приводом.
Гидравлическая система дистанционного управления тормозами звездочек (рис. 134) состоит из насосной станции и щита с элементами гидравлики, размещенных под палубой полубака, и гидроцилиндров 1, расположенных на палубе.
Насосы 72 с сетчатыми фильтрами 13 нэ всасывающих трубопроводах установлены в баке 9. Один из насосов является резервным. Через нагнетательный трубопровод 10 масло от насосов поступает к золотниковым распределителям 3 с электрогидравлическим управлением. Верхняя позиция распределителей соответствует подаче масла через невозвратные клапаны 2 в гидроцилиндры / и растормаживанию звездочки. В нижней позиции распределителей 3 масло из гидроцилиндров вытесняется поршнями под действием пружин в сливной трубопровод 11, происходит затормаживание звездочек. Дроссельные клапаны 2 предназначены для регулирования скорости торможения.
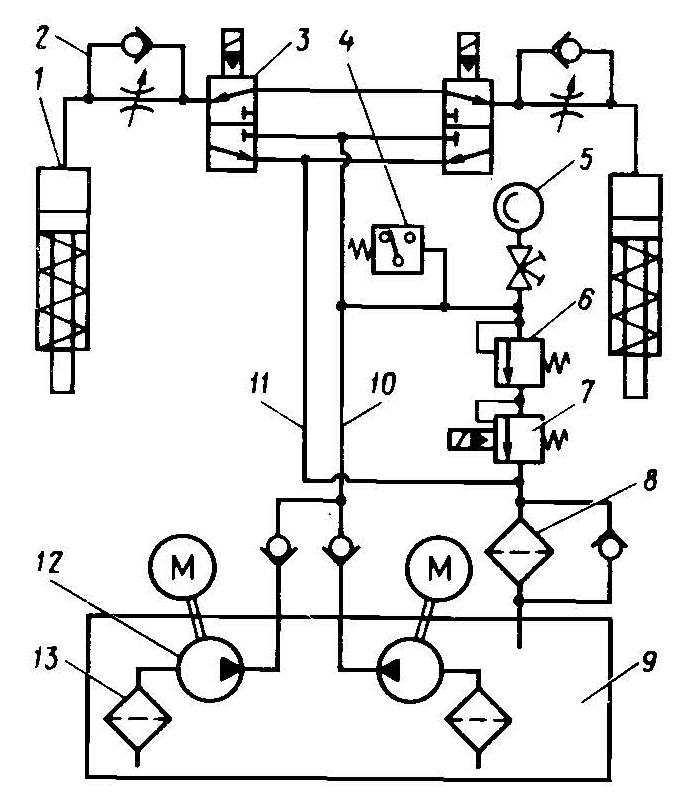
Рис. 134. Схема гидравлической системы тормозного устройства брашпиля
При отсутствии управляющего сигнала распределители 3 находятся в нижней позиции и насосы работают на бак: масло из трубопровода 10 через переливной клапан 6, нормально открытый правляемый переливной клапан 7 и фильтр тонкой очистки 8 направляется на слив. Клапан 6 поддерживает до себя давление 2 МПа, при котором реле давления 4 включает сигнальную лампу готовности системы к действию. С подачей управляющего сигнала на один из распределителей 3 он переключается в верхнюю позицию, пропуская масло к гидроцилиндру 1. Одновременно управляющий сигнал включает переливной клапан 7, настроенный на 5,5 МПа. После этого давление в трубопроводе 10 и гидроцилиндре / возрастает до суммарного значения настройки клапанов 6 и 7, равного 7,5 МПа, что соответствует рабочему давлению. Давление в напорной магистрали контролируется по манометру 5.
Пульт дистанционного управления отдачей якоря на ходовом мостике оборудован кнопками пуска и остановки насосов. При работе насосов на пульте загораются зеленые лампы, при готовности системы к действию - желтые. Нажатием кнопки "отдача якоря" производится растормаживание звездочки. Кнопка удерживается до конца отдачи якорь-цепи, при этом регулирование скорости отдачи подтормаживанием автоматически берут на себя тахогенератор и электрогидравлическая система управления. Контроль за скоростью и длиной вытравленной цепи осуществляется по указателям на пульте.
Для выполнения операций по дистанционной отдаче якоря брашпиль должен быть предварительно подготовлен, а якорь выведен из клюза с местного поста управления.
Обслуживание гидросистемы осуществляется с учетом следующих особенностей. После заливки масла в бак заполнение системы и спуск воздуха производятся в следующем порядке. Включив один из насосов и отвернув воздушные пробки на гидроцилиндрах, переключают золотниковые распределители на растормаживание. При появлении из отверстий гидроцилиндров струи масла без пузырьков воздуха пробки завертывают. Сделав несколько переключений распределителей, вновь спускают воздух из системы. Операцию повторяют с пуском второго насоса, после чего доливают масло в бак.
Для проверки герметичности системы дистанционно растормаживаются оба тормоза и переливной клапан 7 настраивается на давление в системе 11,5 МПа. Убедившись в отсутствии утечек, клапан // настраивают на исходное давление в системе 7,5 МПа.
Лампа, сигнализирующая готовность системы к действию, не загорится при неработающем насосе, невыключенной муфте звездочки, заедании переливного клапана 6 и перегорании нити накаливания лампы.
Дистанционное управление тормозом может не сработать при недостаточном напряжении в цепи управления золотниковым распределителем, низком давлении в гидросистеме или поломке пружины гидроцилиндра.