 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Судовые вспомогательные механизмы
Якорно-швартовные лебедки
Якорно-швартовная лебедка фирмы "Норвинч" (рис. 135) с гидравлическим приводом обеспечивает выполнение следующих операций: отдачу и выбирание якоря при управлении с местного поста; дистанционную отдачу якоря с ходового мостика; швартовные операции с помощью турачки; автоматическое поддержание заданного натяжения швартовного каната барабаном.
Лебедка смонтирована на раме 15. Ее рабочий вал уложен в трех подшипниках скольжения в стойках 5 и приводится во вращение
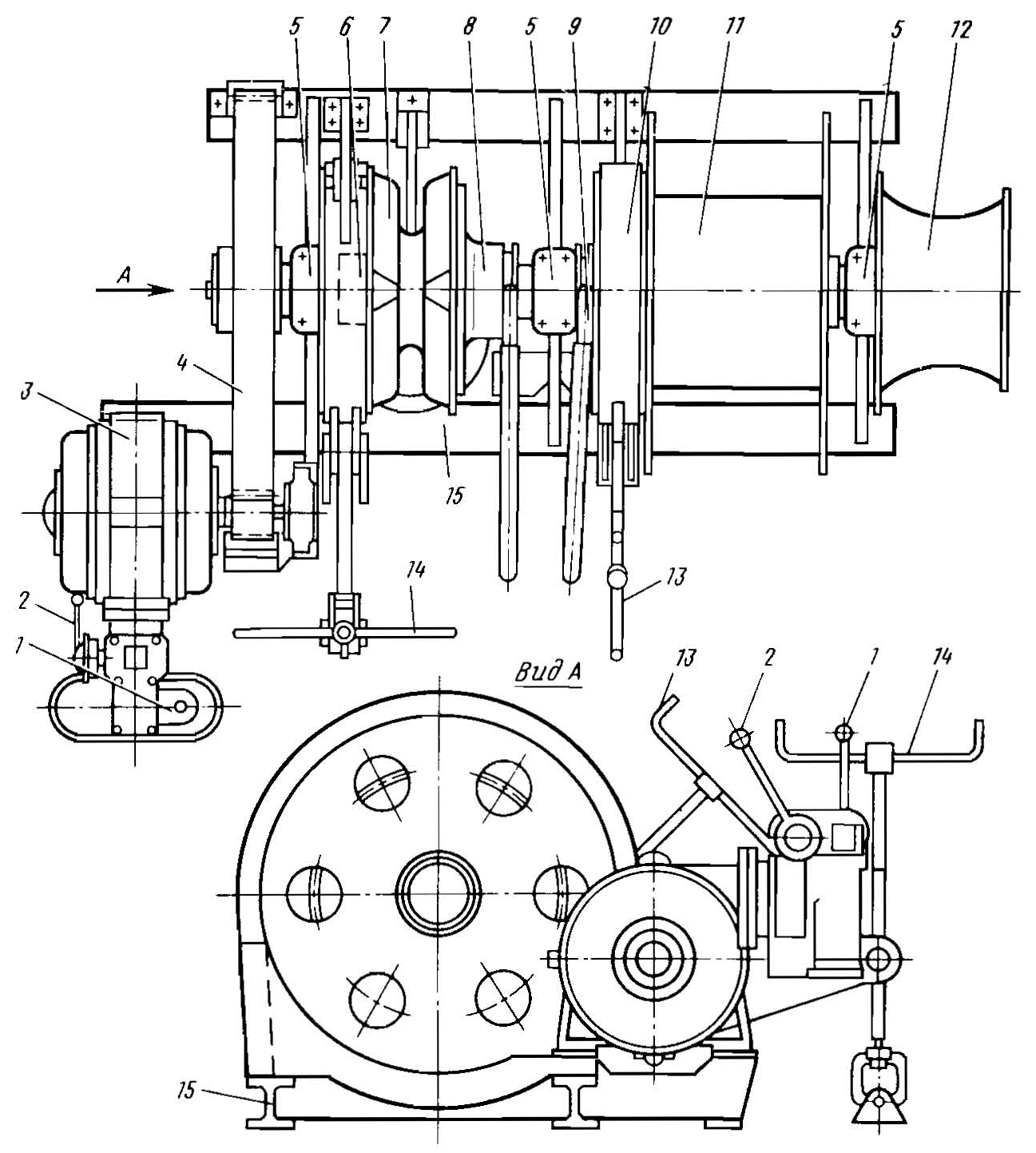
Рис. 135. Якорно-швартовная лебедка фирмы "Норвинч"
пластинчатым гидромотором 3 через одноступенчатый цилиндрический редуктор 4. Цепная звездочка 7 и швартовный барабан // выполнены заодно с тормозными шкивами и свободно посажены на вал, с которым могут соединяться кулачковыми муфтами 8 и 9. В свободном состоянии звездочка 7 и барабан // стопорятся ленточными тормозами 6 и 10 с маховиками управления 14 и 13. Турачка 12 сидит на валу на шпонке.
Управление лебедкой
осуществляется рукояткой 2 ступенчатого изменения скорости и
тягового усилия и рукояткой / реверса. Отдача якоря свободным
травлением цепи происходит при выключенной муфте 8. Скорость отдачи
регулируется ленточным тормозом 6, управ-
ляемым вручную или от гидропривода. Подъем якоря осуществляется гидромотором 3 при включенной муфте 8. Измерение длины вытравленной цепи производится устройством, состоящим из магнитов, установленных на звездочке, и датчика, смонтированного на раме. Датчик возбуждается движущимися магнитами. Его импульсы передаются на указатель, стрелки которого смещаются в направлении движения цепи. Большая стрелка фиксирует длину вытравленной цепи в метрах, малая - в смычках. При подготовке к действию необходимо проверить положение стрелок и при необходимости установить их на нуль.
Дистанционное
управление тормозом цепной звездочки с ходового мостика
осуществляется с помощью электрогидравлической системы (рис. 136),
состоящей из шестеренного насоса J с фильтром 2 и предохранительным
клапаном 1 на нагнетательном трубопроводе, золотникового
распределителя 16 и гидромотора 7, который через редуктор 13 и муфту
12 с гидравлическим управлением приводит во вращение
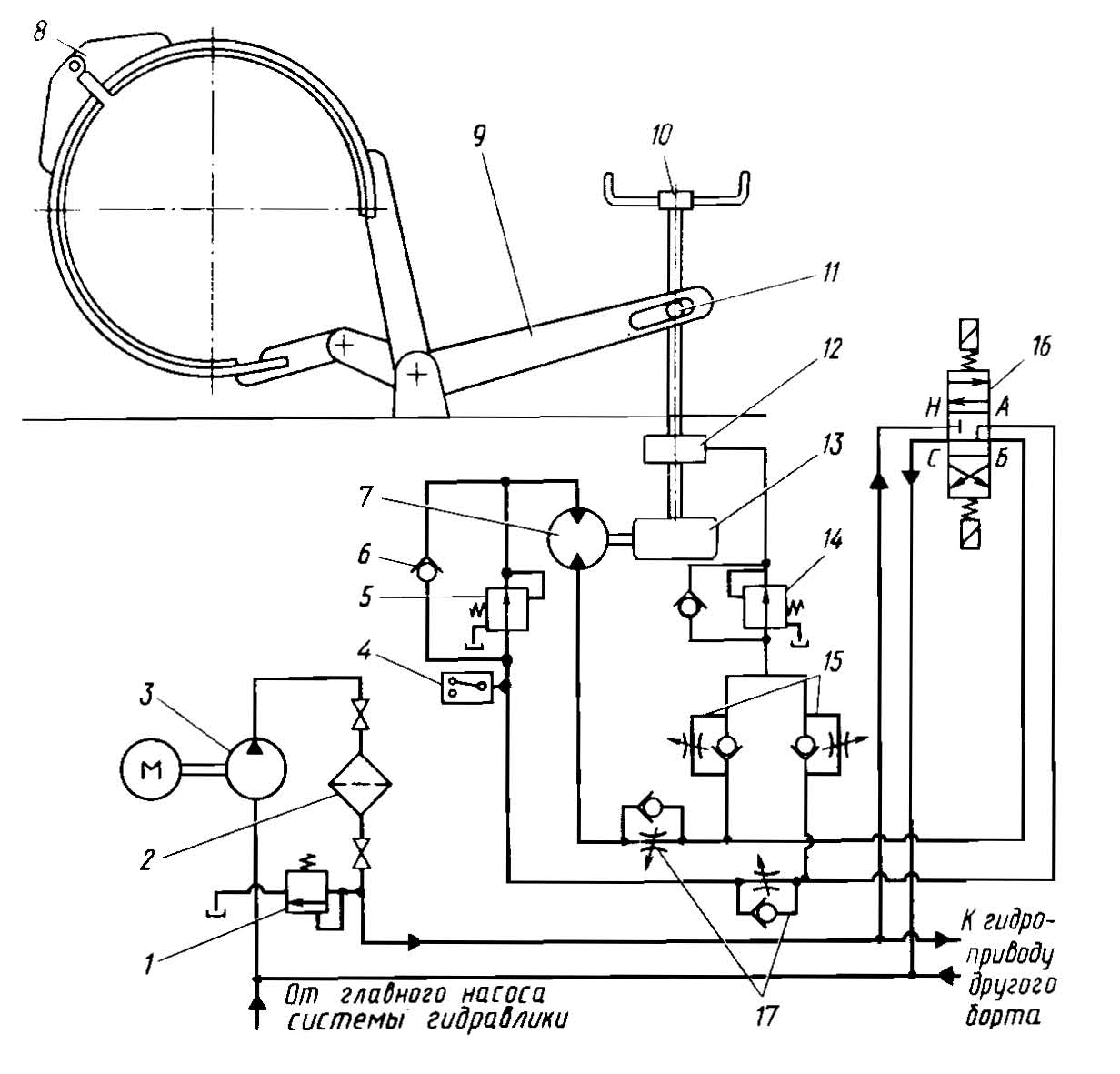
Рис. 136. Схема
гидравлической системы тормозного устройства якорно-швартовной
лебедки фирмы "Норвинч"
тормозной винт 10 с ходовой гайкой //, воздействующей на рычаг 9. Верхняя позиция распределителя 16 соответствует зажатию тормоза 8. Масло из нагнетательного трубопровода поступает в направлении Н-А через редукционный клапан 5, понижающий давление с 3,0 до 1,9 МПа, к гидромотору 7. Путем снижения давления и крутящего момента гидромотора предотвращаются резкое торможение и перегрузка винта 10 под действием тормозного усилия. Через невозвратные клапаны 15 и редукционный клапан 14, понижающий давление до 1,5 МПа, масло поступает на включение муфты 12. Сливная полость гидромотора 7 соединяется через распределитель 16 в направлении Б - С со всасывающим трубопроводом насоса 3. При торможении давление в напорном трубопроводе резко возрастает. Полной затяжке тормозной ленты соответствует давление 4,5 МПа, при котором реле давления 4 размыкает контакты цепи управления распределителя 16, который пружиной устанавливается в среднюю позицию, соединяя отводы А и Б с всасывающим трубопроводом насоса 3. При падении давления в напорном трубопроводе происходит выключение муфты 12. Скорость ее выключения регулируется дроссельными клапанами 15.
Нижняя позиция распределителя 16 соответствует отжатию тормоза. Масло поступает к гидромотору в направлении // - Б и отводится через невозвратный клапан 6 и распределитель 16 в направлении А-С к насосу 3. Дроссельно-невозвратные клапаны 17 служат для регулирования частоты вращения гидромотора и тормозного винта 10, которая должна составлять 20 оборотов за 10 с при затягивании тормоза и 15 оборотов за 10 с при его отдаче. Благодаря наличию дроссельных клапаноЕ 17 на нагнетательном трубопроводе происходит включение муфты 12 до разгона гидромотора 7. При изменении направления вращения винта 10 и реверсировании гидромотора 7 на затяжку тормоза в напорном трубопроводе кратковременно резко возрастает давление. Для того чтобы предотвратить в этот период выключение распределителя 16 под действием реле давления 4, в цепи управления установлено реле времени. Дистанционное управление отдачей якоря производится аналогично описанному ранее.
Управление швартовным барабаном лебедки осуществляется с помощью гидравлической системы (Рис. 137), которая имеет два винтовых насоса 9 с невозвратными клапанами 10 и предохранительным клапаном 8 на нагнетательном трубопроводе; фильтр 7 и расширительный бак 6 на всасывающем трубопроводе; г'идромотор 1, управляемый золотниковыми распределителями 2 и 3 и автоматический клапан 4, смонтированные на корпусе гидромотора. Рукояткой распределителя 3 включаются режимы "выбирать", "травить" и "стоп". Распределителем 2 осуществляют ступенчатое изменение скорости и тягового усилия выбирания швартовного каната.
Средняя позиция распределителя 3 соответствует режиму холостого хода (рис. 137, а), при котором масло из нагнетательного трубе провода // насоса поступает во всасывающий в направлении Н - С, минуя гидромотор /. При установке распределителей 3 и 2 в верхние позиции
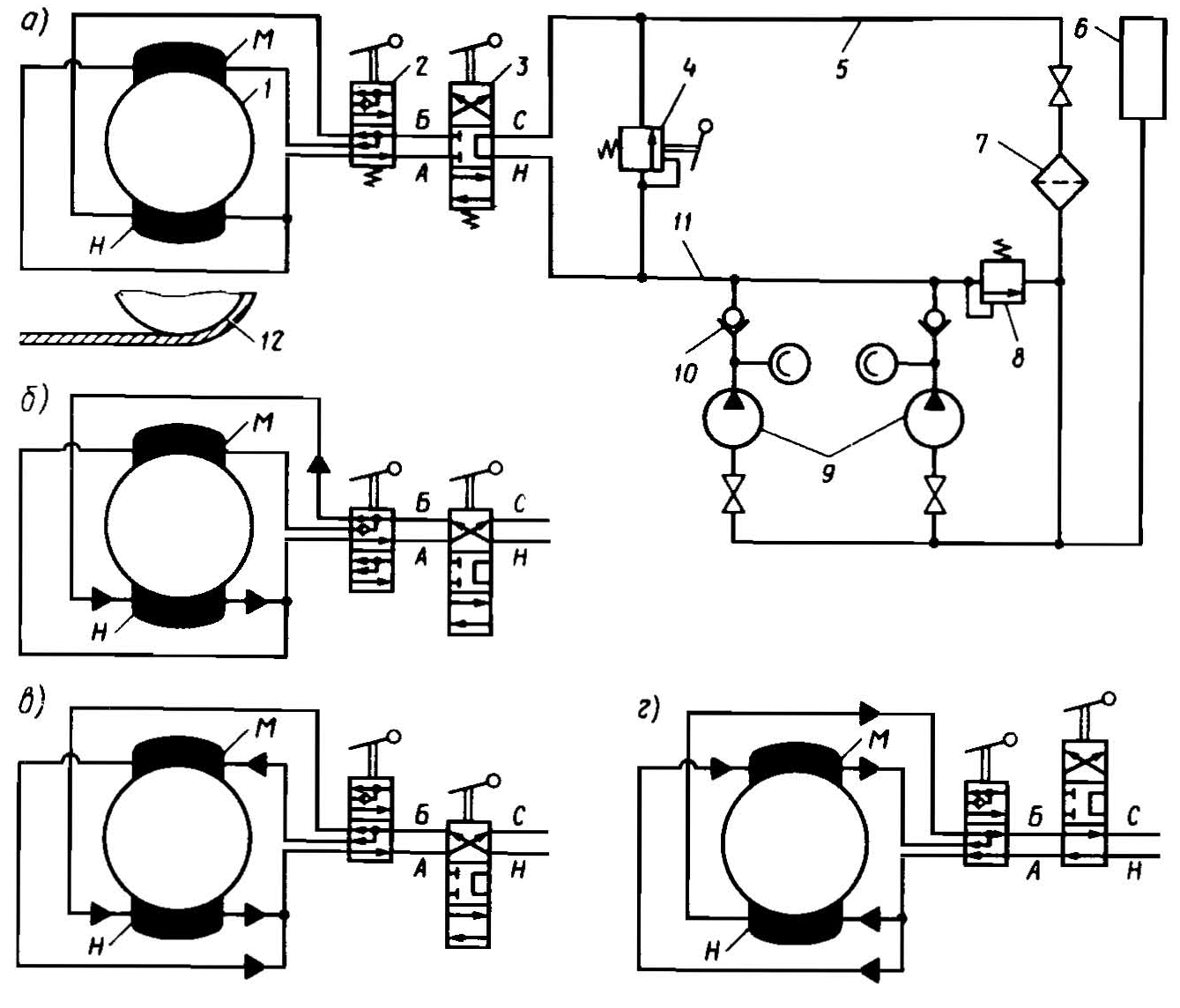
Рис. 137. Схема гидравлической системы управления швартовным барабаном лебедки
(рис. 137, б) масло из напррного трубопровода в направлении Н - Б поступает к рабочей полости Н гидромотора 1 и отводится б направлении А - С. В этом режиме задействована половина рабочего объема гидромотора, что соответствует ускоренной работе при 40 % номинального значения тягового усилия. Переключением распределителя 2 в нижнюю позицию (Рис. 137, в) включается номинальный режим, при котором масло поступает к рабочим полостям М и Н гидромотора 1. Для травления швартовного каната распределитель 3 устанавливается в нижнюю позицию (рис. 137, г). Масло из нагнетательного трубопровода в направлении Н - А поступает к рабочим полостям Я и М гидромотора, изменяя его направление вращения. Отвод масла происходит в направлении Б - С. Изменение позиции распредегителя 2 в этом режиме не меняет скорости травления каната.
Для работы лебедки в режиме автоматического натяжения каната распределители 2, 3 устанавливаются в режим "выбирать" с номинальным тяговым усилием (см. рис. 137, в). Барабан 12 получает вращение против часовой стрелки. Клапан 4 автоматического натяжения каната вращением маховика устанавливается на заданное тяговое усилие, фиксируемое стрелкой на шкале. С помощью этого клапана в нагнетательном трубопроводе поддерживается давление, соответствующее выбранному тяговому усилию гидромотора 1, при этом часть жидкости перепускается в трубопровод 5. При выравнивании усилия натяжения каната и тягового усилия гидромотора гидромотор и барабан останавливаются, а масло из нагнетательного трубопровода 11 через клапан 4 полностью перепускается во всасывающий трубопровод 5. Если усилие натяжения каната окажется меньше тягового усилия гидромотора, он будет выбирать канат до момента выравнивания усилий. При превышении усилия натяжения каната над тягоеым усилием барабан 12 под действием внешней силы изменит направление вращения и будет травить канат. Гидромотор 1 перейдет в насосный режим и будет всасывать масло из трубопровода 5 в направлении С - А и нагнетать в направлении Б - Н (рис. 137, в) в трубопровод 11, откуда оно будет перепускаться клапаном 4 в трубопровод 5. При достижении заданного усилия натяжения каната вновь установится его равновесие с тяговым усилием гидромотора.
Полуавтоматическая система управления отдачей якоря якорно-швартовной лебедки установлена на теплоходах типа "Астрахань". Якорно-швартовная лебедка имеет электрический привод и состоит из автоматической швартовной лебедки, турачки и якорной приставки с полуавтоматическим управлением отдачей якоря.
Система управления якорной приставки состоит из следующих элементов: управляющего редуктора с прибором-указателем; прибора, задающего число вытравливаемых смычек; пневмогидравлической системы управления торможением.
Управляющий редуктор с прибором-указателем (рис. 138) крепится к корпусу 1 якорной приставки параллельно оси звездочки, получает вращение от ее вала через вал-шестерню 2 и передает его на водило 4, сидящее на консольном валу 3 на подшипниках качения. Водило, вращаясь против часовой стрелки, переносит в эту же сторону сателлиты 5, входящие в зацепление с неподвижным венцом 6 и получающие от этого вращение по часовой стрелке, которое передается на подвижный венец 7 и сельсин 8. Передаточное число редуктора очень велико из-за того, что сателлиты вращаются в сторону, противоположную своему поступательному перемещению. Поэтому вал сельсина-датчика 8 при отдаче одного метра цепи поворачивается на Г. Вал сельсина-приемника указательного прибора на мостике поворачивается на такой же угол, фиксируя длину отданной якорь-цепи по шкале.
На валу сельсина-датчика 8 закреплен управляющий диск с двумя кулачками 9. Один из них, воздействуя на микровыключатель, приводит в готовность дистанционную систему управления, другой - прекращает отдачу перед выходом последней смычки якорь-цепи.
Через вал 12 и обгонную муфту 11 осуществляется привод шестеренного насоса 10. Муфта передает вращение насосу только при отдаче якоря.
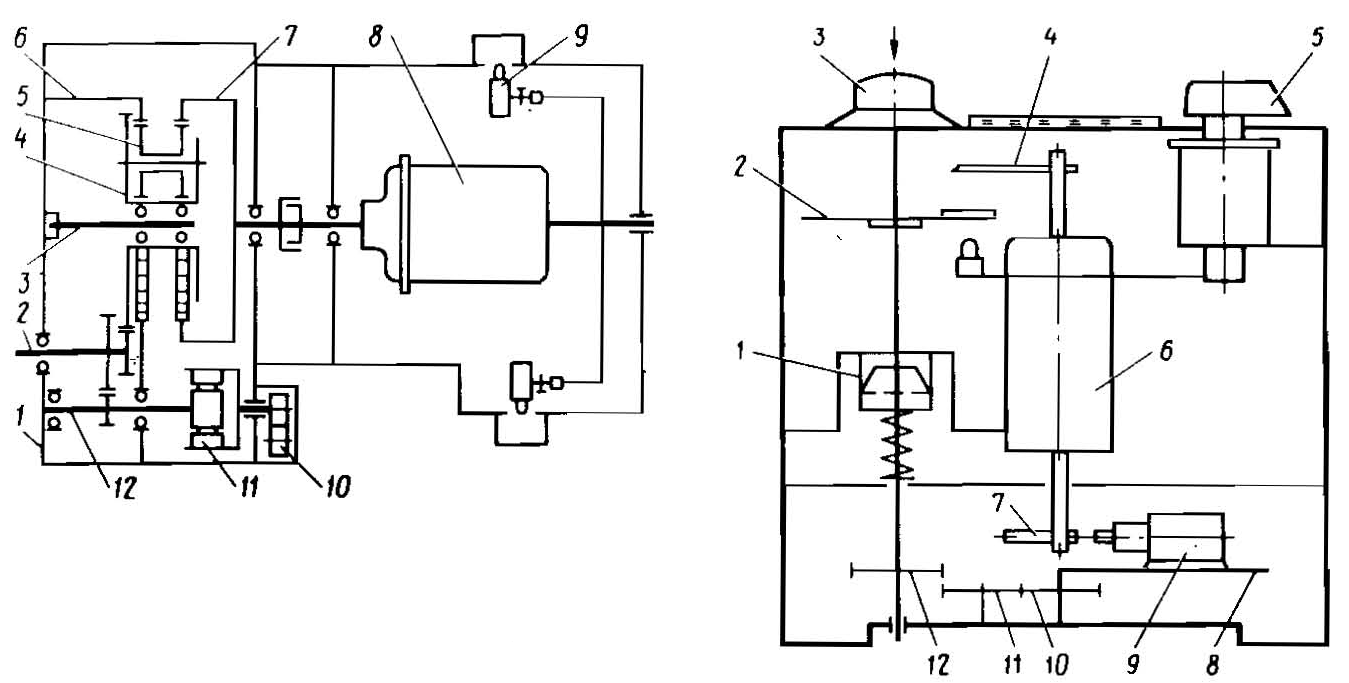
Рис. 138. Управляющий редуктор Рис. 139. Задатчик-ндикатор
В корпусе задатчика-индикатора (рис. 139) установлен сельсин-приемник 6, стрелка 4 которого фиксирует по шкале 2 длину вытравленной якорь-цепи. Для того чтобы запрограммировать нужное число смычек к отдаче, следует нажать ручку 3, ввести в зацепление муфту / и шестерни 12 и //. При повороте ручки 3 будут поворачиваться шкала 2 и через шестерню 10 передачи поворотная площадка 8 с микровыключателем 9. К тому моменту, когда шкала 2 повернется относительно стрелки 4 и укажет задаваемое количество смычек, микровыключатель повернется на соответствующий угол относительно кулачка 7 на валу сельсина-приемника 6. При отдаче заданного числа смычек микровыключатель разомкнет контакты цепи управления торможением звездочки. Выключателем 5 включается подсветка шкалы.
В пневмогидравлической системе управления торможением (рис. 140) управление ленточным тормозом 8 якорной звездочки осуществляется посредством гидроцилиндра 7 двустороннего действия. При перемещении поршня гидроцилиндра влево происходит растормаживание. При перемещении поршня вправо происходит затормаживание под действием давления масла и пружины.
При отдаче якоря сжатый воздух, поступающий через редукционный клапан 15, замыкает контакты реле давления 14 в цепи управления вспомогательного золотникового распределителя 12. Через золотниковый распределитель 13 воздух поступает в нижний цилиндр бустера //. Масло, вытесняемое при этом из верхнего цилиндра бустера, последовательно пройдя через дроссельные клапаны 10 и 9, поступит в гидроцилиндр 7 на растормаживание. Невозвратный клапан 6 препятствует утечке масла при растормаживании. При вращении звездочки на отдачу цепи включается насос /, который через невозвратный клапан 3 подает масло в штоковую полость цилиндра 7, замедляя растормаживание. Дроссельный клапан 4 регулируется так, чтобы противодавление масла и усилие пружины штоковои полости
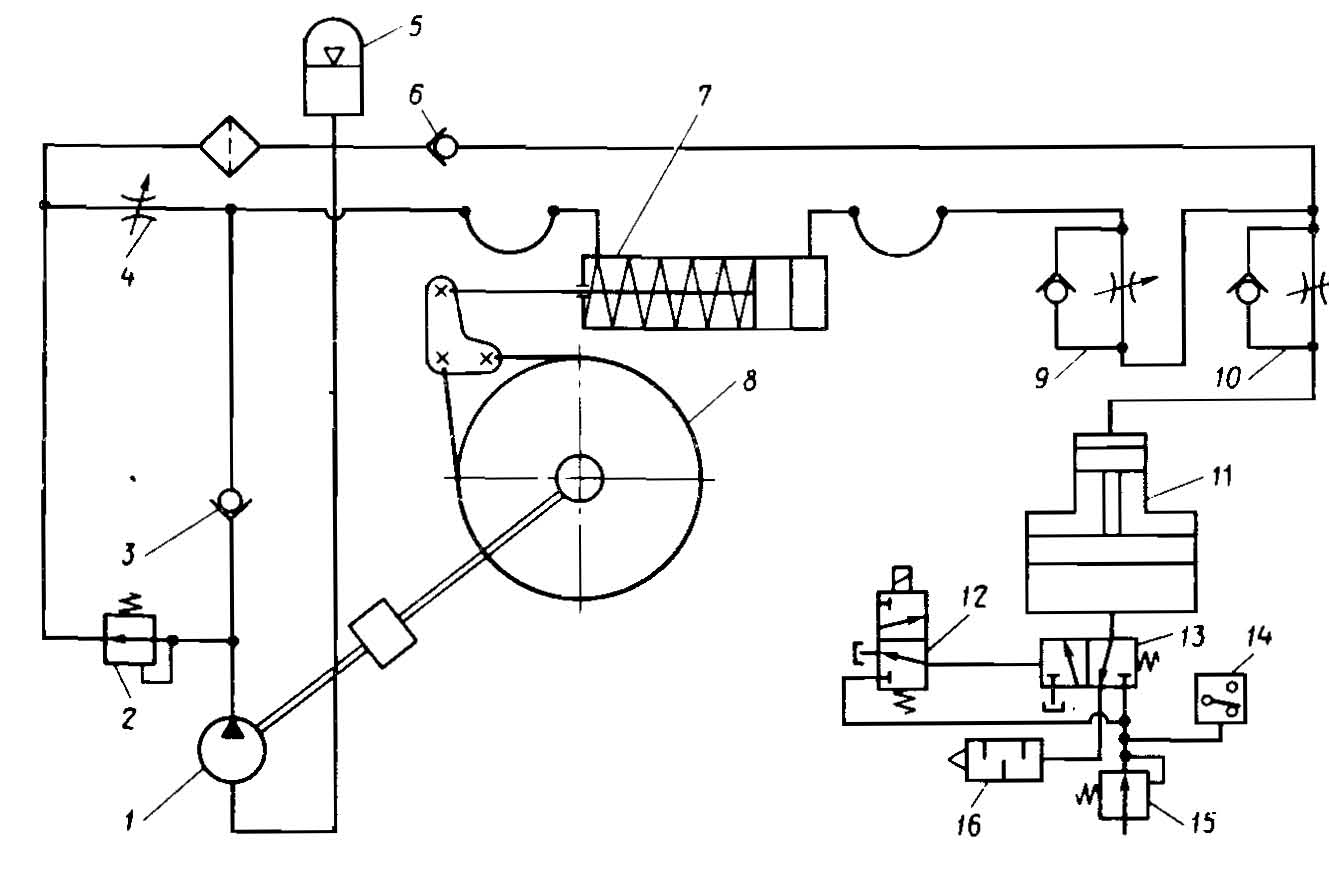
Рис. 140. Пневмогидравлическая система управления торможением звездочки
обеспечивали постоянную допустимую скорость отдачи якоря. Избыток масла, нагнетаемого насосом 1 через редукционный клапан 2 и дроссельный клапан 4 в гидроцилиндр 7 поступает в гидроаккумулятор 5. При прекращении подачи воздуха масло из гидроаккумулятора через дроссельный клапан 4 поступает в штоковую полость гидроцилиндра на затормаживание. Вытесняемое из бесштоковой полости масло через невозвратные клапаны 9 и 10 и из гидроаккумулятора через невозвратные клапаны 6 к 10 нагнетается в бустер 11, воздух из нижнего цилиндра которого вытесняется в атмосферу через глушитель 16.
Дистанционной отдаче якоря предшествует подготовка якорно-швартовной лебедки к действию, о завершении которой на мостик сообщается световым сигналом. Поворотом ручки задатчика-индика-тора задается число смычек, подлежащих вытравливанию, и нажатием кнопки "отдача якоря" якорь приспускается около 2 м (якорь может приспускаться электродвигателем, управляемым с бака). При подходе к месту якорной стоянки вновь нажимают и удерживают кнопку до автоматического торможения звездочки, свидетельствующего о том, что необходимое число смычек вытравлено. Отдача якоря может быть прервана нажатием кнопки "стоп" на баке или на мостике. При последующем нажатии кнопки "отдача якоря" маневр продолжится.
Управление выбиранием якоря осуществляется на баке.