 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Судовые вспомогательные механизмы
Электрогидравлическая система управления электрогидравлическими рулевыми машинами
Большинство судов морского флота советской и зарубежной постройки оснащаются ЭГРМ с электрической системой управления типа "Аист". Ниже на основе функциональной схемы поясняется принцип ее действия и основные положения по эксплуатации.
Система управления (СУ), показанная на рис. 67, состоит из трех основных блоков: пульта управления (ПУ), расположенного на ходовом мостике, исполнительных механизмов (ИМ), смонтированных на насосных агрегатах и управляющих ими по командам ПУ, и рулевого датчика (РД), установленного рядом с баллером для определения истинного положения руля и передачи информации на ПУ.
С помощью СУ можно осуществлять следующие режимы управления рулевой машиной.
"Следящий" осуществляется поворотом штурвала 22 рулевой колонки 26 до достижения стрелкой 20 с индексом 3 (заданный) положения, соответствующего задаваемому углу перекладки по шкале 9 аксиометра. Стрелка 8 с индексом И ("истинный") будет перемещаться синхронно с рулем до совмещения со стрелкой 20. При отклонении руля на заданный угол следящее устройство прекратит действие рулевой машины.
"Автомат" обеспечивает удержание судна на заданном курсе. При отклонении от курса система управления автоматически перекладывает руль для возвращения судна на заданный курс.
"Простой" — резервный вид управления. Перекладка руля на соответствующий борт производится нажатием педали 7 или 21 и удержанием ее, пока руль не достигнет заданного угла. При отпущен-
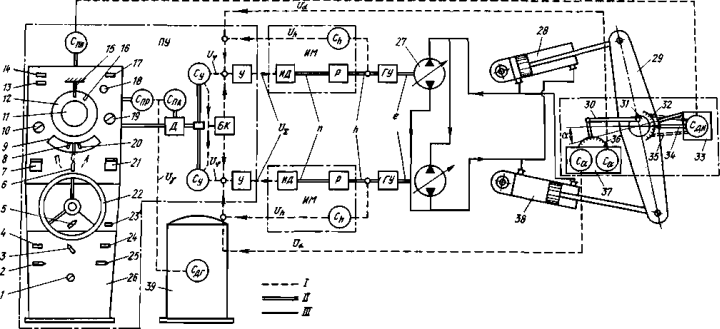
Рис. 67. Функциональная схема электрической системы управления
рулевой машины: I — электрическая связь; II — кинематическая связь;
III — трубопровод
ной педали угол перекладки сохраняется. Возвращение судна на прежний курс производится нажатием педали другого борта.
В этом виде управления элементы следящего устройства ПУ не задействованы. При нажатии педали управления происходит непосредственная подача электрического сигнала к ИМ.
4. "Ручной" (местный) осуществляется поворотом рукоятки, установленной на крышке корпуса ИМ. В этом виде управления электрические элементы ИМ не задействованы, подача насосов 27 изменяется ручным приводом.
Переход с одного режима на другой производится переключателем 6 (см. рис. 67, 68) с фиксатором, при этом замыкаются цепи питания элементов, работающих в данном режиме, и сигнальных ламп режимов "простой" 13, "следящий" 14 или "автомат" 17. На верхней панели ПУ расположены картушки репитера гирокомпаса точного отсчета курса 11 и грубого отсчета 12 с подвижным 16 и неподвижным 15 индексами.
Каждый из насосов 27 связан с ПУ индивидуальным каналом управления. Пуск насосов может производиться от местных выключателей и дистанционно с помощью выключателей 2 и 25. В последнем случае питание одновременно подается к элементам системы управления соответствующего канала и сигнальным лампам 4 и 24. Румпель 29 поворачивается при помощи гидроцилиндров 28 и 38.
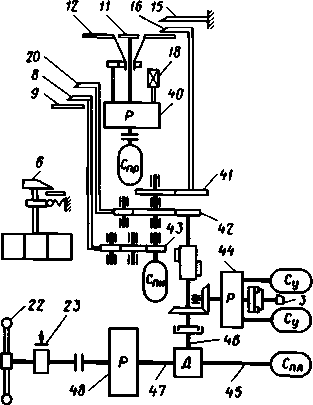
Рис. 68. Кинематическая схема пульта управления (обозначения позиций 1 — 39 такие же, как на рис. 67)
Рассмотрим взаимодействие элементов ПУ. В режиме "следящий" поворот штурвала 22 преобразуется редуктором 48 во вращательное движение вала 47, передаваемое через дифференциал Д и понижающий редуктор 44 сельсина управления Су, электрически связан
ного с ИМ. Одновременно через передачи 42 и 41 стрелка 20 с индексом "3" аксиометра 9 и подвижный индекс 16 репитера гирокомпаса смещаются на заданный угол перекладки. Сельсин-датчик С, связанный с баллером цепной передачей 35, поворачивает ротор сельсина-приемника Ст, который через передачу 43 перемещает стрелку 8 с индексом И аксиометра. При достижении заданного угла перекладки работа рулевой машины и движение стрелки 8 прекращаются.
Сельсин-датчик Сда гирокомпаса 39 при циркуляции судна поворачивает ротор сельсина-приемника С, репитера гирокомпаса,последний через редуктор 40 картушки точного отсчета 11 и грубого отсчета 12 курса относительно неподвижного индекса 15. При возвращении руля в диаметральную плоскость стрелки 8 и 20 возвращаются в нулевое положение, а подвижный индекс 16 совместится с неподвижным 15, что свидетельствует о прекращении циркуляции. Головка 18, расположенная в гнезде верхней панели, служит для согласования репитерных шкал курса с основным прибором гирокомпаса. Во время согласования цепь между сельсинами Сдг и Спр размыкается микровыключателями.
В режим ''автомат" рулевая машина переводится переключателем 6 после вывода судна на заданный курс в режиме "следящий" или "простой". После переключения штурвал 22 фиксируется стопором 23. Отклонение от заданного курса воспринимается гирокомпасом 39, который через сельсин-датчик Сш поворачивает ротор автоматного сельсина-приемника Спа и связанные с ним через дифференциал Д вал 46, редуктор 44 и сельсины С, один из которых задействован на данном режиме. Подвижный индекс 16, связанный с ротором сельсина Спа> показывает угол отклонения от курса. Переключатель 3 устанавливается на угол отклонения судна от курса (±3; 6; 9°), при котором включается звуковая сигнализация. Выключение сигнала производится кнопкой 1. Для внесения в курс поправки, не превышающей ±10°, вращают штурвал 22, смещая подвижный индекс 16 на угол поправки. Углы поворота валов 47и 45 при этом складываются с помощью дифференциала Д после чего судно автоматически выводится на новый курс.
В корпусе исполнительного механизма (рис. 69, а, б) размещен исполнительный двигатель (ИД) 2, который по управляющему сигналу ПУ через редуктор 3 и передачу 6 вращает вертикальный валик 8. Шестерня 10 валика перемещает зубчатую рейку 11 тяги управления 9, сжимая при этом одну из пружин 12 нуль-установителя. Тяга 9 поворачивает через подвижные оси 23, 21 и регулировочный винт 22 рычаг 20 с осью 19, являющейся хвостовиком золотника гидроусилителя. Поворот оси 19 может достигать ±30°. От стороны и угла поворота зависят направление и подача насоса. Последняя ограничивается винтами 18. Винтом 22 устанавливается нулевая подача. Такой исполнительный механизм называется "Прибор ИМ-1". В режимах управления "следящий" и "автомат" управление ИД автоматическое. Перемещение тяги 9 на увеличение подачи насоса до значения, пропорционального углу перекладки руля, и последующее обратное перемещение на уменьшение подачи до нуля происходят при вращении ИД сначала в одну, затем в другую сторону. В режиме "простой" при нажатии педали управления замыкаются контакты обмотки управления ИД, который перемещает тягу 9 на увеличение подачи. При достижении заданного угла перекладки и отпускании педали управляющая обмотка ИД обесточивается, а тяга 9 возвращается в положение нулевой подачи пружиной нуль-установителя. При ручном управлении привод тяги 9 осуществляется через кулачковую полумуфту 4, передачу 5, шестерню 10 и рейку 11. Для сцепления с полумуфтой 4 рукоятка
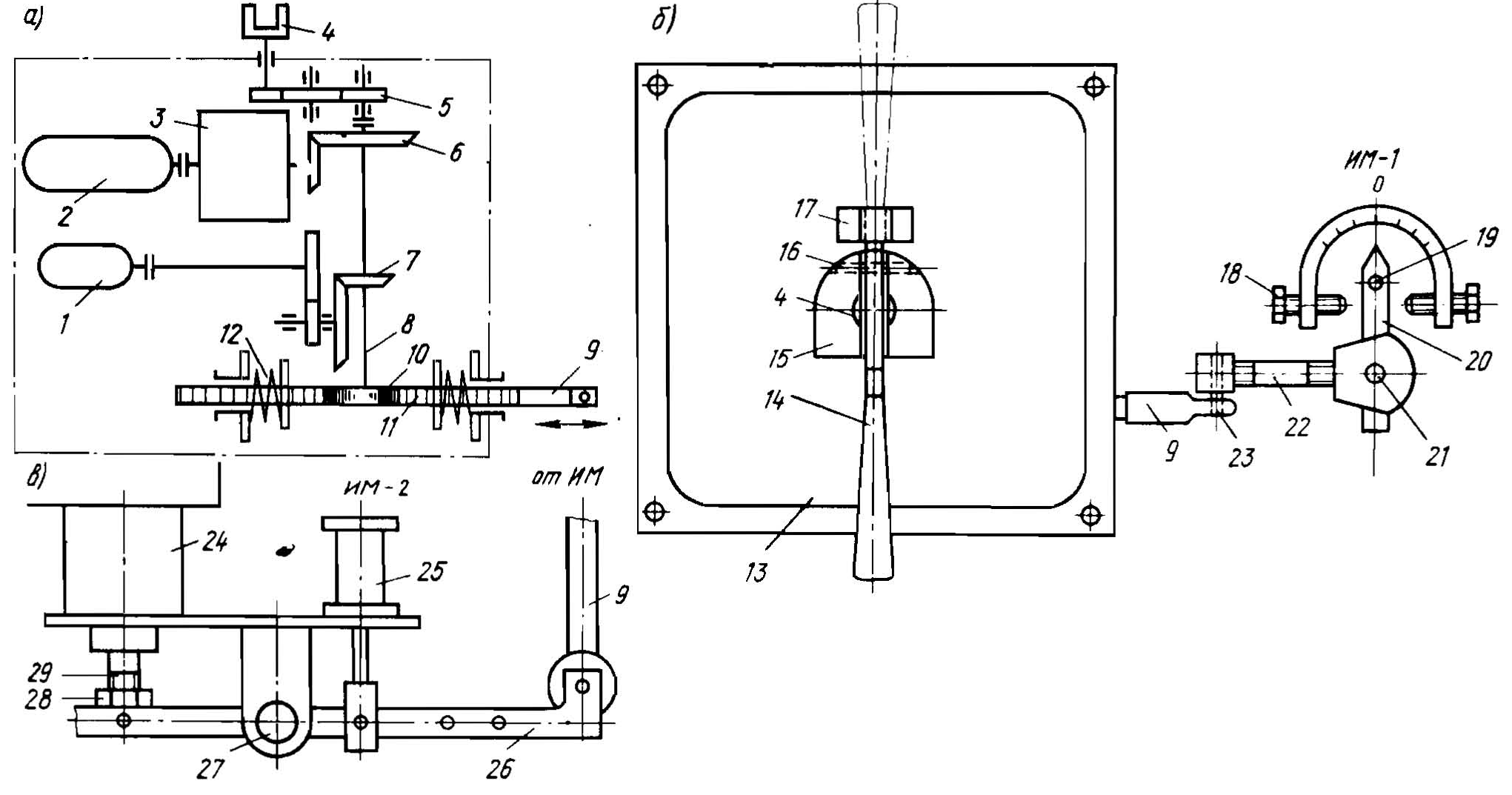
Рис. 69. Исполнительный механизм
14, находящаяся в исходном положении в фиксаторе 17 (показано на рис. 69, б штрихпунктирной линией), поворачивается на 180° вокруг оси 16 хомутика 15, который установлен на крышке 13 и может свободно вращаться вокруг своей оси. После поворота полумуфты 4 рукоятка 14 удерживается до достижения рулем заданного угла перекладки, затем отпускается и пружина 12 возвращает тягу 9 в положение нулевой подачи насоса. Валиком 8 через передачу 7 поворачивается ротор сельсина-датчика /, переменный электрический сигнал которого, пропорциональный величине подачи насоса, вводится в ПУ. На одной из ступеней редуктора 3 установлена фрикционная муфта предельного момента.
На рис. 69, в показан исполнительный механизм, называемый "Прибор ИМ-2". Это вариант передачи от ИМ к гидроусилителю 24, золотник 29 которого перемещается поступательно. Управляющий сигнал от тяги 9 передается рычагу 26, который поворачивается на подшипнике качения 27 и переставляет золотник 29. В положение нулевой подачи золотник возвращается пружиной нуль-установителя 25. Регулировочный винт и контргайка 28 предназначены для установки золотника 29 в среднее положение, соответствующее нулевой подаче насоса.
Рулевой датчик (см. рис. 67) состоит из сельсина-датчика Сда истинного положения руля, связанного с баллером 31 цепной передачей 35, и двух сельсинов обратной связи Са, переменный электрический сигнал которых, пропорциональный углу поворота руля, вводится в ПУ. Роторы сельсинов Са связаны с баллером 31 рычажной системой 30, валиком, выведенным в нижней части корпуса 37, и зубчатой передачей. Над рычагом, связанным с валиком, установлена шкала 36 положения руля. В корпусе 37 размещено ограничительное устройство, кулачки которого при наибольшем угле перекладки ±35° размыкают контакты обмотки управления исполнительного двигателя ИД. Стрелка 34, закрепленная на корпусе 33 в диаметральной плоскости или параллельно ей, по шкале 32 румпеля 29 показывает положение руля, дублируя показания шкалы 36.
Рулевая машина большую часть времени управляется по одному каналу и лишь в сложных навигационных условиях включаются два канала управления, при этом удваивается скорость перекладки руля.
Рассмотрим действие системы управления при работе одного канала. В режиме "следящий" при повороте штурвала стрелка 20 отклонится на заданный угол Ф, а ротор сельсина С повернется на пропорциональный угол и с его выходной обмотки на вход усилителя У будет подано напряжение £/ф. Усиленный сигнал поступит на управляющую обмотку ИД, частота вращения которого будет понижена и преобразована в линейное перемещение управляющей тяги h редуктором Р. Гидроусилитель ГУ под действием управляющего сигнала h будет смещать управляющий орган насоса 27, задавая направление и подачу Q (направление подачи на рис. 67 показано стрелками). Выходной сигнал ИМ воспринимается сельсином обратной связи Ch, а угол поворота руля -сельсином Са. Оба сельсина вырабатывают обратные сигналы Uh и Ua, противоположные по фазе управляющему сигналу LL. Сигналы поступают на вход усилителя У по суммирующей схеме. Суммарный сигнал U^ будет изменяться следующим образом:
![]()
Управляющий сигнал остается постоянным, в то время как по мере увеличения подачи (Q) и угла перекладки (а) абсолютное значение обратных сигналов Uh и Ua будет возрастать. При уменьшении суммарного сигнала до нуля:
![]()
ИД остановится, выход управляющей тяги (h) прекратится при установившейся подаче насоса (Q).
Продолжающаяся перекладка руля приведет к дальнейшему росту обратного сигнала {Ua), при этом суммарный сигнал изменит фазу:
![]()
ИД изменит направление вращения, выход управляющей тяги h и подача Q насоса, а вместе с ними и обратный сигнал Uh будут уменьшаться. Угол перекладки руля и сигнал Ua будут увеличиваться, пока подача насоса не станет равной нулю, а управляющий LL и обратный Ua сигналы не сравняются по абсолютному значению, т. е.
![]()
Перекладка прекратится. Угол отклонения руля будет равен заданному штурвалом ПУ.
При возвращении штурвала в исходное положение управляющий сигнал Uw станет равным нулю, а суммарный сигнал - обратному сигналу переложенного руля - Ua, т. е.
![]()
ИД получит вращение, при котором выходной сигнал (-Л) изменит направление подачи. Фаза обратного сигнала Uh также изменится. Руль начнет перемещаться в сторону диаметральной плоскости, обратный сигнал Ua уменьшаться. Однако пока Ua будет оставаться по абсолютному значению больше Uh, ИМ будет увеличивать подачу:
![]()
В момент выравнивания обратных сигналов ИД остановится:
![]()
Пружина нуль-установителя начнет уменьшать выход управляющей тяги и сигнал Uh, что вновь приведет к нарушению равновесия:
![]()
Суммарный сигнал t/j-, поступая на обмотку управления ИД, будет противодействовать пружине нуль-установителя. При дальнейшем уменьшении угла перекладки руля произойдет уменьшение Ua и возникнет повторяющийся ступенчатый процесс, при котором оба сигнала будут уменьшаться и достигнут нуля с приходом руля в диаметральную плоскость.
В режиме "автомат" при отклонении судна от заданного курса на угол "р вместе с катушкой гирокомпаса повернется сельсин-датчик СдГ С его выходной обмотки напряжение Uy поступит на автоматный сельсин-приемник Спа, который через дифференциал Д повернет роторы сельсинов С. В действующем канале управления с выходной обмотки С сигнал Uy поступит в блок коррекции БК, где будет введена поправка АБК на условия плавания, и суммарный сигнал ILK = U + АБК поступит на вход усилителя У. В результате суммирования управляющего сигнала Щк и обратных сигналов Uh и Ua, как и в режиме "следящий", перекладка руля прекратится при
![]()
Под действием переложенного руля судно будет возвращаться к заданному курсу, а сельсин С поворачивать роторы сельсинов Спа и С в обратном направлении. Это приведет к уменьшению сигнала Uy и изменению фазы сигнала поправки блока коррекции АБК. Суммарный сигнал на входе в усилитель U^ также изменит фазу:
![]()
В результате руль начнет перекладку в обратном направлении, и поскольку в момент достижения им диаметральной плоскости суммарный сигнал t/j. из-за введенной поправки АБК не достигнет нуля:
![]()
При этом перекладка руля будет продолжаться на другой борт, благодаря чему уменьшится перекат судна через линию курса. Отклонение на другой борт в результате переката вызовет повторение процесса выравнивания судна.
Переключатель чувствительности 5 "точно-грубо" связан с потенциометром, понижающим в положении "грубо" значение сигнала, поступающего на усилитель, а следовательно, и чувствительность системы управления. Из-за меньшей точности в удержании курса при установке переключателя в положение "грубо" в штормовых условиях уменьшается число перекладок и нагрузка на рулевую машину.
Поправка АБК состоит из двух составляющих, подбираемых опытным путем и вводимых в блок коррекции с помощью ручек 10 и 19.
Подготовка СУ к работе. 1. После наружного осмотра рулевой машины включить питание схемы рулевых указателей и убедиться, что разность показаний по шкале рулевой машины и стрелки "истинный" аксиометра не превышает Г.
Запустить насос от местного выключателя в румпельном отделении, в режиме "ручной" переложить руль на какой-либо борт на 30° и вернуть в диаметральную плоскость, после чего переключить управление пуском насоса на ПУ.
Установить переключатель видов управления в режим "простой". Согласовать показания репитера ПУ с гирокомпасом.
Поочередной перекладкой руля в режиме "простой" на правый и левый борт убедиться в срабатывании конечных выключателей при положении стрелки "истинный" ±35° ±Г, после чего вернуть руль в диаметральную плоскость и убедиться, что при отпускании педали выбег руля не превышает 1-2°.
Установить переключатель видов управления в режим "следящий". Проверить работу СУ поочередной перекладкой руля на правый и левый борт. Для этого задать угол перекладки 30° и убедиться, что разница в показаниях стрелок "истинный" и "заданный" не превышает 2°. Увеличить угол перекладки до максимального и убедиться в срабатывании конечных выключателей в положении стрелки "истинный" ±35° ±Г. Вернуть руль в диаметральную плоскость.
Установить переключатель видов управления в режим "автомат" и проверить введение поправок по специальной методике.
Подготовка второго канала управления производится аналогично. Подготовка рулевой машины к работе выполняется за 12 ч, но не позже чем за 2 ч до выхода судна из порта.
Включение и обслуживание СУ во время работы. 1. Переключатель видов управления установить в режим "простой" и включить насос с ПУ.
При следовании длительное время постоянным курсом рекомендуется использование режима "автомат". Поправки на ПУ подбираются в зависимости от состояния моря, скорости хода, водоизмещения судна так, чтобы рыскание судна было наименьшим при минимальном числе перекладок руля.
В штормовую погоду переключатель чувствительности установить в положение "грубо".
С целью равномерного изнашивания оборудования через каждые 12 ч работы рекомендуется переходить на другой канал управления.
Для более высокой маневренности судна и надежности системы управления в стесненных условиях рекомендуется одновременная работа двух каналов управления в режиме "следящий". При появлении неисправности в следящих системах следует перейти на режим "простой".
При выключении рулевой машины руль приводят в нулевое положение, переключатель видов работы устанавливают в положение "простой" и с ПУ выключают насосы.