 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Судовые вспомогательные механизмы
Электрические рулевые машины
Электрические рулевые машины обычно разделяются по конструкции передачи от баллера к электродвигателю на винтовые, секторные, винтозубчатые.
Наибольшее распространение на морских судах получили секторные рулевые машины с главным электрическим и вспомогательным ручным приводами, имеющими отдельные редукторы. Рассмотрим секторную рулевую машину типа РЭР7,5-II, установленную на многих отечественных БМРТ.
Рулевая машина (рис. 1) смонтирована на фундаменте 2, а крутящий момент вала электродвигателя 1 через одноступенчатый цилиндрический редуктор 3 и червячный редуктор 5 передается цилиндрической шестерне 6, сидящей на его выходном валу. Валы редукторов и электродвигателя соединены между собой эластичными пальцевыми муфтами. Шестерня 6 поворачивает зубчатый венец сектора 8, бронзовой втулкой посаженного свободно на голову баллера 14 руля. Ниже сектора на баллер на шпонках насажен продольный румпель 12, связанный с сектором двумя пружинными амортизаторами 9 одностороннего действия, которые предохраняют зубья передач от поломки при ударах волн о перо руля. Составная ступица румпеля имеет тормозной шкив с клиновым ручьем, который зажимается тормозными колодками с помощью винта 13 с рукояткой 10.
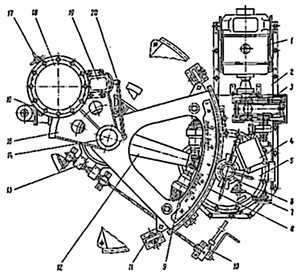
Рис. 1.
Сектор 8 поддерживается опорными роликами 11, по которым он перекатывается при перекладке руля. Поворот сектора ограничивается электрическим конечным выключателем 4 с приводом от вала шестерни 6 и буферными ограничителями. Положение пера руля передается на пост управления электрическим датчиком 19 с приводом 20 от баллера руля.
Сектор 15 запасного ручного привода закреплен на баллере. Его зубчатый венец поворачивается шестерней выходного вала червячного редуктора 18, червяк которого вращают штурвалом с помощью валиковой передачи 16. Основной и запасной приводы отключаются кулачковыми муфтами, соединяющими червячные шестерни редукторов 5 и 18 с их валами. Муфты передвигаются рычажными приводами, которые управляются маховиками 7 и 17. Баллер затормаживают при переходе с механического управления на ручное и обратно.
Червячный редуктор рулевой машины показан на рис. 2. Сварной корпус 1 редуктора имеет кронштейны для верхней опоры 2 вала 7 червячной шестерни 4. Шестерня 4 сидит на валу свободно и соединяется с ним кулачковой муфтой 5, скользящей по валу на шпонках. Муфта передвигается рычагом 6, пальцы 10 с сухарями которого входят в проточку муфты. Рычаг 6 качается на пальце кронштейна 8 с помощью траверзной гайки 9 и винта с маховиком 11. Вращая маховик 11, поворачивают рычаг 6, включая или выключая муфту 5.
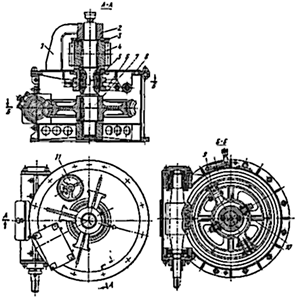
Рис. 2.
Вал 7 уложен в бронзовые втулки-подшипники, а червяк лежит на двух конических роликоподшипниках и шарикоподшипнике. К торцу шестерни 4 крепится коническое зубчатое колесо 3 привода конечного выключателя.
В основу расчета электрической рулевой машины положен максимальный момент на баллере Мб (кН-м):
Мб = Мα + Мтр или Мб = ЕМα
гдеМα — момент от гидродинамического давления воды на перо руля; Мтр — момент от сил трения в опорах руля; Е — коэффициент, учитывающий трение в опорах руля, который обычно принимается для обыкновенных рулей равным 1,05 — 1,1 и для подвесных рулей — 1,15 — 1,20.
Тяговый расчет электрической рулевой машины может проводиться в следующем порядке. Прежде всего составляется расчетная схема привода. Учитывая, что момент на баллере руля при эксплуатации редко достигает максимального значения Мб, электродвигатель выбирают не по максимальному, а по некоторому промежуточному моменту на баллере:
Мб.э = ξ Мб
где ξ = 0,55 - 0,70.
При этом перекладка руля при максимальном моменте Mбосуществляется за счет некоторой перегрузки электродвигателя.
Мощность электродвигателя N(кВт) в первом приближении находится по выражению
N = Mб.э ωб / 1000 ηм
где Mб.э — расчетный момент на баллере, Н•м; ωб — угловая частота поворота сектора, рад/с; ηм — КПД секторной машины, который в предварительных расчетах может быть принят равным 0,38 — 0,40.
Перекладка руля от угла 35° одного борта на угол 30° другого борта должна производиться за 28 с, тогда угловая частота поворота баллера
ωб = (а10 +а20) π / 180º τ = (35+30) π / 180 · 28 = 4,06 · 10-2
При данной мощности подбирают электродвигатель и принимают его номинальную частоту вращения nном. Для привода секторных рулевых машин применяют электродвигатели постоянного тока серии П с номинальной частотой вращения вала 12,5 и 16,67 об/с (750 и 1000 об/мин).
Передаточное число рулевой машины будет
i = ωдв / ωб
Чаще всего передаточное число рулевой машины определяют по выражению
i = ωдв / ωб а
где а = 1,05 - 1,10 — коэффициент, отражающий способность электродвигателя изменять частоту вращения в зависимости от нагрузки.
Затем проверяют, что у принятого двигателя стояночный момент под током Мст создает на баллере момент Мб.ст, который превосходит Мбв отношении
Кст = Мб.ст / Мб
где Кст = 1,2 - 1,3 — коэффициент перегрузки.
Величина Мб.ст (Нм) определяется по формуле
Мб.ст = Мст i ηм
При проверке механизма на прочность максимальный момент, развиваемый двигателем, можно условно принимать равным 2 - 2,25 номинального.