 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Навигация
Счет направлений в море
За основное направление в навигации принимают линию N — S в плоскости истинного горизонта.
При счете направлений главным образом применяется круговая система счета. В ней все направления указываются числом от 0 до 360° по часовой стрелке от северной части истинного меридиана.
|
Рис. 6. Круговая и румбовая системы |
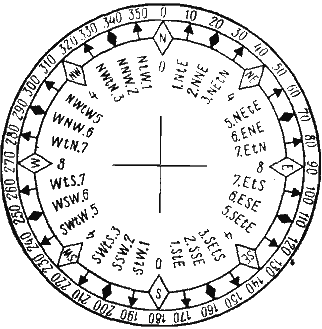

Направления N, Е, S, W являются главными румбами и делят горизонт на четыре четверти: NE — северо-восточную, SE — юго-восточную, SW — юго-западную и NW — северо-западную. Каждая четверть делится пополам четвертными румбами: NE, SE, SW, NW. Румбы, расположенные посередине между главными и четвертными, имеют название, состоящее из букв главного и четвертного румба (NNE, ENE, ESE, SSE, SSW, WSW, WNW, NNW) и называются трехбуквенными. Остальные румбы называют нечетными промежуточными. Их название складывается из наименования ближайшего главного или четвертного румба, буквы t («ten» — предлог «к» на голландском языке) и наименования главного румба, в сторону которого расположен данный румб. Например: NtE, NEtN, NEtE, EtN, и т.д. В каждой четверти румбы имеют номера от 0 до 8, причем счет ведется от направления N в NE и NW четвертях и от точки S в SE и SW четвертях. На рис. 6 показана румбовая система счета совместно с круговой. Румбовая система применяется для указания направления ветра, волнения, а иногда и течения.
В мореходной астрономии применяют удобные при вычислениях полукруговую и четвертную системы счета направлений (азимутов).
В полукруговой системе счета направления отсчитываются от точки N или S в сторону Е или W от 0 до 180°. Например: S 120°Е, N95' W, N 30° Е и т. д.
В четвертной системе направления отсчитываются аналогично полукруговой, но от 0 до 90е, поэтому указанные в примере направления обозначатся следующим образом: NE60°, SW85°, NE30°.На рис. 7 показана для сравнения круговая, полукруговая и четвертная системы счета направлений.
При решении задач навигации в основном имеют дело с направлением движения судна и направлением на ориентиры и суда.
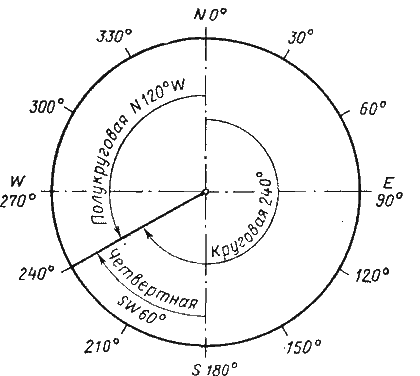
Рис. 7. Соотношение круговой, полукруговой и четвертной систем счета
|
Рис. 8. Истинные направления |
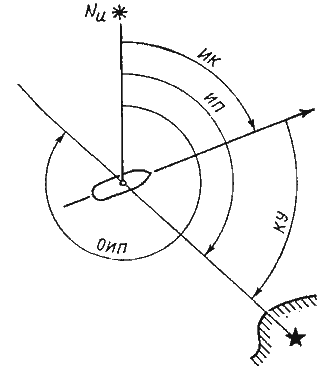
Истинный курс (ИК) — угол в плоскости истинного горизонта между северной частью истинного меридиана (полуденной линией NS) и диаметральной плоскостью судна по направлению его движения. Диаметральная плоскость в пересечении с плоскостью истинного горизонта дает линию курса. Поэтому истинный курс измеряется углом между линией истинного меридиана и линией курса в круговой системе счета (рис. 8).
Истинный пеленг (ИП) — угол в плоскости истинного горизонта между северной частью истинного меридиана (полуденной линии NS) и направлением из точки наблюдения на предмет. Вертикальная плоскость, проходящая через направление на предмет в пересечении с плоскостью истинного горизонта дает линию пеленга. Истинный пеленг измеряется углом между линией истинного меридиана и линией пеленга в круговой системе счета.
Направление, отличающееся на 180° от истинного пеленга, называют обратным истинным пеленгом (ОИП).
В практике судовождения часто определяют направления относительно диаметральной плоскости судна.
Курсовой угол (КУ) — угол между носовой частью диаметральной плоскости и направлением из точки наблюдения на предмет. Курсовой угол измеряется в полу круговом счете от 0 до 180° правого и левого бортов. При вычислениях курсовые углы правого борта (КУ пр/б) считают положительными, а левого (КУл/б) — отрицательными.
Наряду с полукруговой системой для измерения курсового угла применяют и круговую систему от 0 до 360° по часовой стрелке. В круговой системе даны курсовые углы на шкалах радиолокатора, радиопеленгатора и на азимутальном круге магнитного компаса. При вычислениях курсовой угол в круговой системе счета считают всегда положительным.
Из рис. 8 видно, что ИК, ИП и КУ связаны следующей зависимостью
ИП=ИК+КУ.
Если предмет расположен на курсовом угле 90° правого или левого борта, то говорят, что он расположен на траверзе соответствующего борта.
Направления в море определяют с помощью компасов. В настоящее время на судах используются магнитные и гироскопические компасы.