 |  |
тел.: +7 495 1087345 факс.: +7 495 1087345 office@trans-service.org |
 |  |  |
 |
 |



Навигация
Навигационные особенности плавания в узкостях
Наличие и близость навигационных опасностей, а также частое изменение курсов придают судовождению в узкостях весьма сложный и напряженный характер.
Плавание в узкостях требует четкого и жесткого контроля за перемещением судна с заранее спланированными обсервациями, которые должны выполняться наиболее быстрыми способами, обеспечивающими максимальную точность. Любой маневр в узкости должен выполняться на основе расчета и измерений.
Плавание в узкостях осуществляется только по фарватерам, каналам и рекомендованным курсам, точно по створам или придерживаясь правой стороны разрешенной полосы движения, так как любое небольшое отклонение от рекомендованного курса может быть опасным для судна. Плавание должно проходить в соответствии с предварительной прокладкой. Счисление пути судна должно вестись особенно тщательно на откорректированных и поднятых картах масштаба 1 : 50 000 и крупнее.
При плавании в узкостях обычно руководствуются следующим.
1. При подходе к узкостям со стороны моря необходимо располагать курсы перпендикулярно линии, соединяющей наиболее узкие участки входа в стесненные для плавания районы. Вход в узкость начинается с подходного буя, которым обозначается начало рекомендованного пути. Выход судна к бую производится на основе надежной обсервации или использования берегового радиомаяка, или работающей радиостанции, как было описано ранее.
2. Счислимое место судна при подходе к узкости может быть уточнено по измеренным глубинам.
3. Следуя узкостью, необходимо удерживать судно на рекомендованной линии пути с помощью створа, радиоствора или ведущего кабеля, а курсы судна обязательно рассчитывать с учетом суммарного сноса.
4. Все проходимые ориентиры отмечаются по времени на линии пути, а ориентиры плавучего ограждения сличаются с указанными на карте или в лоциях и пособиях «Огни и знаки», проверяются названия, окраска, вид топовых фигур, характер и цвет огня. В ночное время ориентиры освещаются прожектором.
|
|
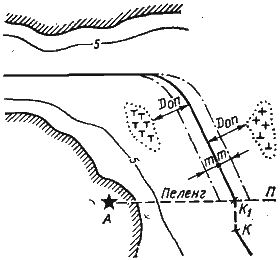
| Рис. 118. Поворот на новый курс по пеленгу ориентира |
При расположении ориентира на траверзном курсовом угле измеряется пеленг на него, а на острых курсовых углах — дистанция до ориентира.
5.
Контроль безопасности плавания производится
по обсервациям с использованием
всех имеющихся на судне навигационных и радио технических средств с применением сеток изолиний, ограждающих линий положения. Обсервации
производятся как можно чаще и для этого в первую очередь используются ориентиры
штатного берегового ограждения,
во вторую — ориентиры береговой
черты,
а
затем
— плавучие маяки.
6. Точка и время поворота на новый очередной курс рассчитывает ся по обсервации с таким расчетом, чтобы после нанесения ее на карту последующими определениями можно было уточнить время начала поворота.
При невозможности произвести обсервацию на данном курсе перед поворотом на новый курс измеряется пеленг (рис. 118) П на ориентир А, параллельный новому курсу, а счислимое место судна К в момент взятия пеленга переносится по перпендикуляру в точке K1.Такое уточнение положения судна обеспечивает выход на новый курс, минуя опасности, если предельная погрешность места судна по траверзу
m<Don,
где т — погрешность места судна по траверзу;
Don — минимальное расстояние до ближайшей опасности.
Судно точнее выйдет на новую линию курса, если расстояние пути от измеренного пеленга до поворота будет как можно меньше.
7. При поворотах на новый курс обязательно учитывается цирку ляция судна с учетом сноса течением и воздействия ветра с таким расчетом, чтобы после поворота судно точно находилось на новой намеченной линии пути или на линии створа.
8. Скорость судна определяется по пройденным расстояниям.
9. При повороте около близлежащих подводных опасностей нельзя срезать углов для сокращения расстояний и нельзя заходить за изолинию, ограждающую опасности.
10. В процессе всего перехода в узкости постоянно следят за изменением элементов течения и дрейфа.
11. При прохождении около стенок каналов, причальных линий, плавдоков, земснарядов и вблизи стоящих судов и т. д. необходимо уменьшать ход до минимума, чтобы избежать явления присоса.
12. В районах с малыми глубинами поднимаются все забортные подъемно-опускные устройства электронавигационных приборов, а глубины непрерывно контролируются постоянно работающими эхолотами.
13. Навигационные РЛС в узкости должны быть включены и находиться в постоянной работе, а другие — в постоянной готовности.
14. Все резервные посты управления рулем приводятся в готовность к немедленному использованию.
При уменьшении видимости и неисправном радиолокаторе не рекомендуется входить в узкость, а если судно находится в узкости, необходимо стать на якорь. В плохую видимость не входят в узкость, если ее ширина меньше двойной минимальной рабочей дальности действия радиолокационной станции.